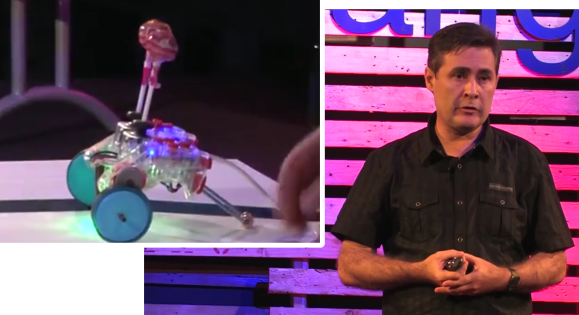
Meet [Dr. Thomas Tilley] and his robot Suckerbot which looks very much like a clear-plastic six-axis controller. His presentation at this year’s TEDxChiangMai is made of the stuff that makes us feel warm inside.
[Thomas] has been using joystick hacks to bring smiles to faces of kids in his part of Thailand. The video below covers some that he has done over the years. These include racing cockpits made out of PVC or bamboo which patch into a cheap joystick to control the action on a traditional gaming console. He’s also spun a different take on multiplayer Guitar Hero by splitting up the fret and strum actuators between several different kids.
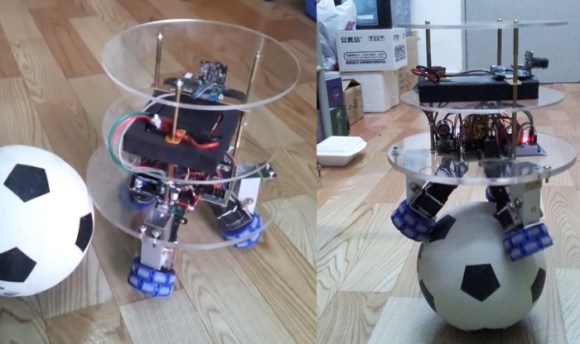
But the main topic of his presentation is Lollybot, which is an Americanized version of its original moniker: Suckerbot. This was his entry into a 2012 contest which tasked hackers to build a robot that would cost under $10 to replicate in the classroom. That’s quite a challenge but he actually did it with enough to spare for a snack afterwards. Suckerbot is so named because he added a couple of candy suckers to the analog joysticks of a knock-off PlayStation controller. They act as inverted pendulums; when the robot runs into something the suckers shake which can be read by the computer controlling the robot. Food container lids wrapped with rubber act as wheels which are spun by the vibration motors from the joystick. And there’s even a set of line-following sensors built from photoresistors and some LEDs. His calculated cost? Just $8.96!
The hope is that robot projects stemming from this contest will help produce the next generation of hackers in Africa. If this stuff gets you excited you can take part. This year’s challenge deadline has been extended.
Continue reading “Hacking Helps Bring Educational Robot Projects In For A Few Dollars”