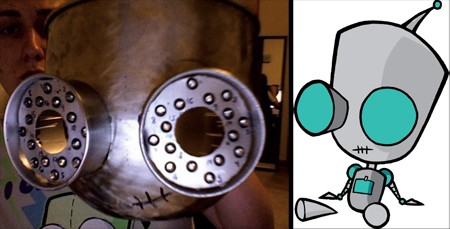
We love hardware modding, robots, and generally all things in the DIY category, but cartoons are pretty awesome too. The hilarious yet sadly short lived Nickelodeon cartoon Invader Zim was a favorite ours, due in no small part to a character called GIR, a little borderline insane robot. Not content with just a cartoon, a group of Montana State Univesity, Bozeman graduates have decided to build a real, functional GIR robot.
For those unfamiliar with the cartoon, GIR is a quirky, malfunctioning robot designed to help an alien named Zim take over Earth. Loaded with cameras, lights, and all manner of Inspector Gadget style devices in the cartoon, the team have their work cut out for them: if their version is even half as advanced as the cartoon version, it would be several generations more advanced than anything we’ve ever seen. So far, the team has only begun working on the head and neck, installing servos to control its motion, cameras, decorative LEDs in the eyes, and the software to control it all. According to [Arthur Krebsbach], one of the project contributors, this is a long term, open-ended project that will employ new technology as it becomes available. The project is a bit silly, but legitimately ambitious; [Krebsbach] notes, “I don’t think we will ever be satisfied with the Gir until he can fly but runs out of fuel quickly because he replaced it all with Tuna.”
[via JhnenVEE]