
We’ve seen aircraft based on “helicopter” seeds (technically samara seeds, which include those of maples and elms) before, but this recent design from researchers at the Singapore University of Technology and Design (SUTD) shows how a single small motor can power a spinning monocopter capable of active directed flight, including hovering.
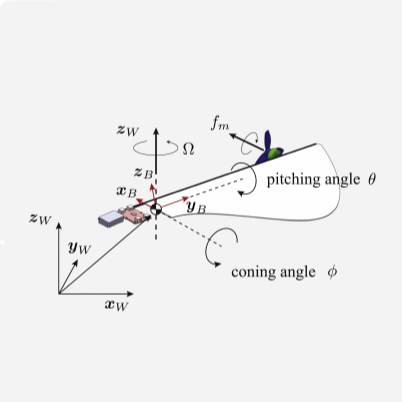 The monocopter is essentially an optimized wing shape with a single motor and propeller at one end. Hardware-wise it might be simple, but the tradeoff is higher complexity in other areas. Physical layout and balance are critical to performance, and software-wise controlling what is basically a wing spinning itself at high speed is a complex task. The payoff is highly-efficient flight in a package that self-stabilizes; it weighs only 32 grams and has a flight time of 26 minutes, which is very impressive for a self-contained micro aircraft.
The monocopter is essentially an optimized wing shape with a single motor and propeller at one end. Hardware-wise it might be simple, but the tradeoff is higher complexity in other areas. Physical layout and balance are critical to performance, and software-wise controlling what is basically a wing spinning itself at high speed is a complex task. The payoff is highly-efficient flight in a package that self-stabilizes; it weighs only 32 grams and has a flight time of 26 minutes, which is very impressive for a self-contained micro aircraft.
We saw what looks like an earlier version of this concept from SUTD that was capable of directed flight by modifying the airfoil surface, but like the seeds it was modeled after, it’s more of a glider. This unit has the same spinning-seed design, but is actively powered. A significant improvement, for sure.
For those who prefer their DIY micro aircraft a little more traditional-looking, be sure to check out the design details of a handmade and fully operational 1:96 scale P-51 Mustang that weighs only 2.9 grams. It even has retractable landing gear! When one can manage to keep mass to a bare minimum, a little power goes a long way.
 Whatever we choose to call it — builder [tesla500] dubbed it the simultaneously optimistic and fatalistic “Ikarus” — it’s really unique. The monocopter is built around a 90-mm electric ducted fan mounted vertically on a 3D-printed shroud. The shroud serves as a mounting point for the landing legs and for four servos that swivel vanes within the rotor wash. The vanes deflect the airstream and provide the thrust vectoring that gives this little machine its control.
Whatever we choose to call it — builder [tesla500] dubbed it the simultaneously optimistic and fatalistic “Ikarus” — it’s really unique. The monocopter is built around a 90-mm electric ducted fan mounted vertically on a 3D-printed shroud. The shroud serves as a mounting point for the landing legs and for four servos that swivel vanes within the rotor wash. The vanes deflect the airstream and provide the thrust vectoring that gives this little machine its control.









