Any student new to the principles of fluid dynamics will be familiar with Bernoulli’s principle and the Venturi effect, where the speed of a liquid or gas increases when the size of the conduit it flows through decreases. When applying this principle to real-world applications, though, it can get a bit more complex than a student may learn about at first, mostly due to the shortcomings of tangible objects when compared to their textbook ideals. [Mech Ninja] discovered this while developing a ducted fan based around an RC motor.
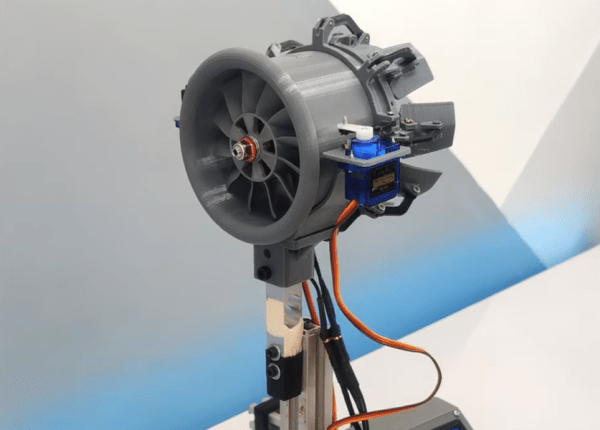
The ducted fan is meant to be a stand-in for a model jet engine, based around a high-powered motor generally designed for drone racing. Most of the build is 3D printed including duct system, but in order to improve the efficiency and thrust beyond simple ducting, [Mech Ninja] designed and built a variable nozzle to more finely control the “exhaust” of his engine. This system is also 3D printed and can restrict or open up the outflow of the ducted fan, much like a real jet engine would. It uses two servos connected to collars on the outside of the engine. When the servos move the collars, a set of flaps linked to the collars can choke or expand the opening at the rear of the engine.
This is where some of the complexity of real-life designs comes into play, though. After testing the system with a load cell under a few different scenarios, the efficiency and thrust weren’t always better than the original design without the variable nozzle. [Mech Ninja] suspects that this is due to the gaps between the flaps, allowing air to escape and disrupting the efficient laminar flow of the air leaving the fan, and plans to build an improved version in the future. Fluid dynamics can be a fairly complex arena to design within, sometimes going in surprising directions like this ducted fan that turned out better than the theory would have predicted, at least until they accounted for all the variables in the design.
Continue reading “Variable-Nozzle Ducted Fan Provides Fluid Dynamics Lessons”



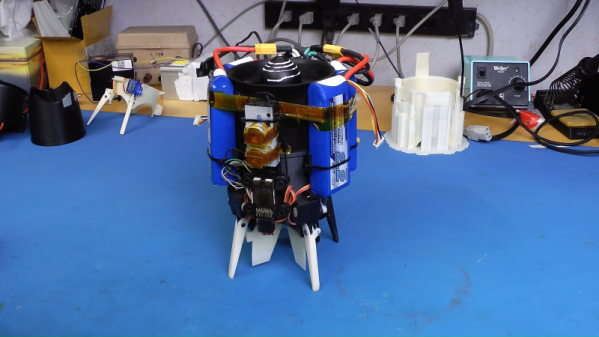
 Whatever we choose to call it — builder [tesla500] dubbed it the simultaneously optimistic and fatalistic “Ikarus” — it’s really unique. The monocopter is built around a 90-mm electric ducted fan mounted vertically on a 3D-printed shroud. The shroud serves as a mounting point for the landing legs and for four servos that swivel vanes within the rotor wash. The vanes deflect the airstream and provide the thrust vectoring that gives this little machine its control.
Whatever we choose to call it — builder [tesla500] dubbed it the simultaneously optimistic and fatalistic “Ikarus” — it’s really unique. The monocopter is built around a 90-mm electric ducted fan mounted vertically on a 3D-printed shroud. The shroud serves as a mounting point for the landing legs and for four servos that swivel vanes within the rotor wash. The vanes deflect the airstream and provide the thrust vectoring that gives this little machine its control.








