Microcontrollers and Arduinos are cool and all, but dealing only in the digital domain does have its limitations. In fact, most of your electron heroes didn’t begin their electronics career by blinking pins on digital outputs; they were solely in the analog domain with their radios and, yes, guitar effects pedals.
[Josh]’s entry for The Hackaday Prize was by far the most analog project of the entire contest. It’s an open source effects pedal that takes advantage of the modular design of the most popular pedals in history.
A good number of the famous circuits for turning an electric guitar into an aural experimentation are based on small circuit modules, packaged and repackaged again until the desired tone is achieved. [Josh] wants to pack these modules separately on different boards, specifically shields, although no Arduino is used, so any sound can be created.
Already [Josh] has done some research to determine what circuits and circuit modules to clone. The list should be fairly familiar to anyone with a pedalboard – Tube Screamers, Fuzz Faces, Big Muffs, and Phase 90s are at the top of the list. He may not get to the complicated digital effects like pitch shifters and digital delays, but it’s still a great project for experimentation.
You can see [Josh]’s project video below.
 This project is an official entry to The Hackaday Prize that sadly didn’t make the quarterfinal selection. It’s still a great project, and worthy of a Hackaday post on its own.
This project is an official entry to The Hackaday Prize that sadly didn’t make the quarterfinal selection. It’s still a great project, and worthy of a Hackaday post on its own.
Continue reading “Extrinsic Motivation: An Open, Modular Effects Pedal” →
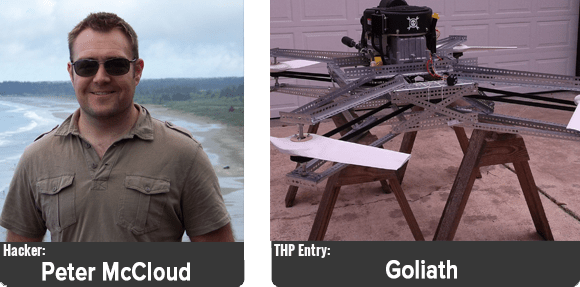



 While the tight new engine was quickly losing RPM, the propeller and belt system still had quite a bit of inertia. As the video after the break shows, the belts started flapping and caught on the propeller blades. The front right prop tip caught the double-sided toothed belt, pulling it up and over the propeller. The other end of that same belt lives on the right rear prop. It too caught a propeller blade, snapping the composite blade clean off its hub. The bent steel pulley axles are a testament to the forces at work when things went wrong.
While the tight new engine was quickly losing RPM, the propeller and belt system still had quite a bit of inertia. As the video after the break shows, the belts started flapping and caught on the propeller blades. The front right prop tip caught the double-sided toothed belt, pulling it up and over the propeller. The other end of that same belt lives on the right rear prop. It too caught a propeller blade, snapping the composite blade clean off its hub. The bent steel pulley axles are a testament to the forces at work when things went wrong.








