Barring the smallest manned airplanes, most aircraft that are pulled around by a prop have variable pitch propellers. The reason for this is simple efficiency. Internal combustion engines are most efficient at a specific RPM, and instead of giving the engine more gas to speed up, pilots can simply change the pitch of a propeller. With a gas powered engine, the mechanics and design of variable pitch propellers are well understood and haven’t really changed much in decades. Adding variable pitch props to something pulled around by an electric motor is another matter entirely. That’s what [Peter McCloud] is building for his entry to the Hackaday Prize, and it’s going into the coolest project imaginable.
This project is designed for a previous Hackaday Prize entry, and the only 2014 Hackaday Prize entry that hasn’t killed anyone yet. Goliath is a quadcopter powered by a lawnmower engine, and while it will hover in [Peter]’s test rig, he’s not getting the lift he expected and the control system needs work. There are two possible solutions to the problem of controlling the decapatron: an ingenious application of gimballed grid fins, or variable pitch rotors. [Peter] doesn’t know if either solution will work, so he’s working on both solutions in parallel.
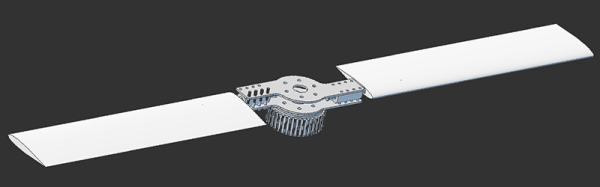
[Peter]’s variable pitch rotor system is basically an electronic prop mount that connects directly to the driven shafts on his gas-powered quadcopter. To get power to the electronics, [Peter] is mounting permanent magnets to the quad’s frame, pulling power from coils in the rotor hub, and rectifying it to DC to drive the servos and electronics. Control of the props will be done wirelessly through an ESP32 microcontroller.
Variable pitch props are the standard for everything from puddle jumpers to acrobatic RC helis. In the quadcopter world, variable pitch props are at best a footnote. The MIT ACL lab has done something like this, but perhaps the best comparison to what [Peter] is doing is the incredible Stingray 500 quad. Flite Test did a great overview of this quad (YouTube), and it’s extremely similar to a future version of the Goliath. A big motor (in the Stingray’s case, a brushless motor) powers all the props via a belt, and the pitch of the props is controlled by four servos. The maneuverability of these variable pitch quads is unbelievable, but since the Goliath is so big and has so much mass, it’s doubtful [Peter] will be doing flips and rolls with his quads.
You can check out a video of [Peter]’s build below.
Continue reading “Hackaday Prize Entry: Electric Variable Pitch Props” →