
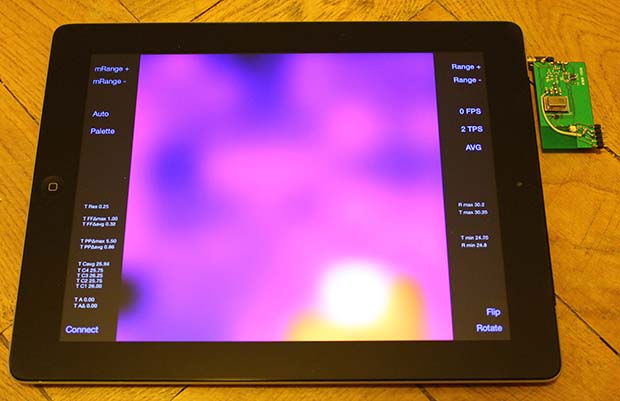
A student team at Ohio State University has designed and built a custom Controller Area Network (CAN) data acquisition system complete with a sensor interface, rider display, and a Linux-based data logger for a RW-2x motorcyle.
They call their small, convenient micro-controller circuit board the Magic CAN Node, and it measures automotive sensors throughout the electric vehicle. This includes a variety of thermistor resistors to check changes in temperature. A few 0-5V and 0-12V sensors to monitor brake pressure transducers along with some differential air pressure sensors can be added too. Since the vehicle is basically a “rolling electromagnetic noise bomb”, they wanted to keep all of these analog sensors as close to the source as possible.
The Magic CAN Node is based on a Texas Instruments microcontroller called the TMS320F28035. This keeps the energy consumption at a low level.
For message handling, the team, led by [Aaron], tapped into the built-in CAN module within the F28035. All of the CAN plugs have two of the pins shorted to GND or +12V, so when there’s only one plug connected, the analog switch IC will connect a 120 ohm resistor across the CAN lines.
Continue reading “Custom CAN System Logs Motorcyle Data Like Magic”

 We have a new round of
We have a new round of 
 [Kenji]’s project for The Hackaday Prize is the
[Kenji]’s project for The Hackaday Prize is the 










