Grass is a lovely thing to have, but unfortunately it tends to grow excessively long if left unattended. Obviously, one can use a regular lawn mower, but [Daniel] of [rctestflight] decided to build something remote-control instead. (Video, embedded below.)
To get started, [Daniel] fitted X-acto blades to a brushless outrunner motor, and tested their ability to cut grass. Satisfied with the performance, he built a trailer to tow behind an RC tank mounted to such a setup, with some success. With the concept beginning to bear fruit, he went with a clean sheet design for maximum performance.
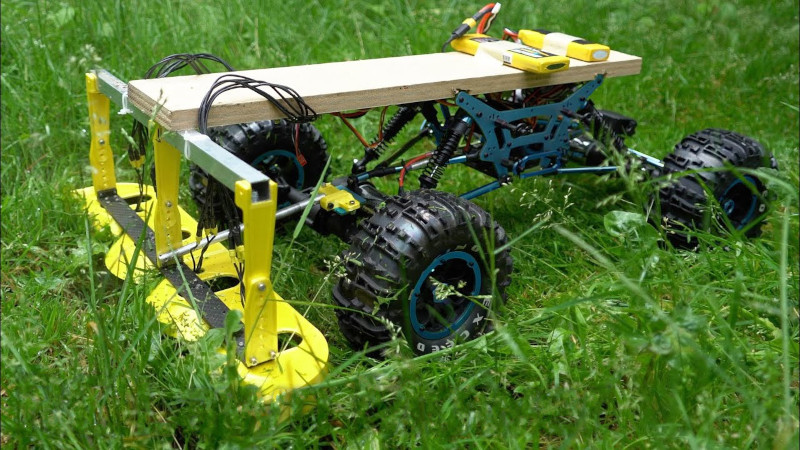
The final build relies on an RC rock-crawler chassis, fitted with a brushless motor using field oriented control for maximum torque at low speeds. This allows the RC mower to slowly push through the grass without overwhelming the cutter heads. As for the cutter heads, the final rig has eight motors, each sporting two blades to chop down long field grasses with impunity.
[Daniel] notes that it’s remarkably fun to cut the grass in this way, and is surprised not to have seen more builds in this area. (Editor’s note: he needs to read more Hackaday.) Of course, we’ve seen plenty of autonomous builds, too.














At the end of the day you can proudly say: using my 3D printer I made something that gives work to people at waste sorting facility.
Ultimately that’s true of a lot of hobbies, 3D printing isn’t unique in that regard. My 3D printer also reduces waste by helping me repair things that would otherwise have been thrown out.
Best to start with a battery lawn mower and add the remote control or automation onto it. I am going to start a build based off a ryobi frame soon
I can’t wait to see the solar automated rover with mower blades attached!!
I would approach the subject differently though. Most automated mowers on the market have a strategy of “very frequent mowing, low load”. But Daniel seems to have an approach of “high load capacity, once the grass has grown high” for his RC mower.
If his automated rover is wandering all day long, it could cut grass as it grows, and not wait for high grass to grow. So the load on the blades would be very light and almost always at the same height.
It could charge in the sun for hours, then go for a small mowing according to its battery charge. Depends on several factor of course : total area, sun exposition, battery capacity, and so on.
But in the end, the mower only cuts a few millimeters of grass each time, which reduces the load and allows for blade location optimization. You only need to cut the grass manually once for the initial height trimming, then the auto-mower does the rest every day.
The blades on this approach are also very simple. I have a Worx automatic lawnmower, and it just uses a set of three razer blades on a spinner.
Centimeter-accurate geolocation is also getting relatively cheap (like $250 instead of several thousand), so geofencing can be done that way rather than a buried boundary wire. That wire is the biggest problem with current systems, IMO.
Until now no robot I’m aware of are able of cutting high grass in rugged terrain.
I’m not sure if this is intentional due to market prospects (because most of people like to have their grass cut often) or as you said a chosen strategy or a combination of both.
But I see some benefit in letting weeds grow. First personally I prefer landscape variety instead of boring flat and perfectly cut terrain.
Secondly, higher weeds with flowers can feed insects like bees
Finally it reminds me when grass was cut using scythe.. perhaps the grass could be collected to feed animals…
I’m currently building a similar rover as Daniel’s if you’re interested ( post below…)
“outrunner motor”
That’s the 2nd time you’ve used that term recently.
Is that ‘strine for what us Yanks call an outboard motor?
No, it’s standard RC terminology for a motor that has the rotor outside of the stator (and where the motor’s case usually rotates).
Higher torque at lower speeds, and most commonly used for RC aircraft where the prop is directly coupled to the motor.
https://en.wikipedia.org/wiki/Outrunner
Snowblowing drones please.. just need to keep the roof dusted off as it snows so it never piles. up..
Grass is a lovely thing to have,
Sure. But so is a decent life, which more people cpuld have if your grass wasnt more important.
your selfishness is absolutely disgusting.
You had me agreeing with you until the last sentence.
B^(
Chopping weed
A lot of us would have a better life if people didnt judge what we think is important to us. How does your post improve anyone’s life? If you want to go improve someone else’s life, get out there and do it.
4WD might be needed here as a little dip can cause a lot of stationary dysfunction, unless you have a putting green lawn. A lithe suspension may cause a choppy effect with the cutting out in front. Some of us have hills to mow, so the thought of tank treads comes to mind.
With a typical mower, or even a weed wacker, the cutting element serves two purposes: one: cut the grass, two: move the cut grass out of the way. The problem with this guy’s mower is that his cutting elements are only doing the first part of the job.
Looks just like an automower cutting system
I’m currently building a similar project as this one with a slight different approach though, using an hedge trimmer instead of moving blades.
I had to first fix some blocking issues lately such as rover struggling to move in high grass and the cutting system but hopefully some conclusive tests should come..
I’ll post progress on the project’s log page which hasn’t been updated much since creation on hackaday.io (https://hackaday.io/project/171672-autonomous-grass-cutting-rover) but project is still alive and rover has progressed a lot..
Quest for the best lazy lawn care. The most expensive and expansive non profit yielding crop. Except for golf courses. Thinking its a hacker staple or possibly rite of passage. Not the least effective nor most dangerous I’ve seen. I have to like it. Its a hacker imperative.
There are lots of good resources at https://www.ardumower.de/en/
When I have infinite spare time, I would lime to build one too!