In the everything old is new again folder, [Lesics] has a good overview of axial flux motors. These are promising for electric vehicles, especially aircraft, since the motors should have high torque to weight ratio. The reason this is actually something old is that the early generators built by Faraday were actually of the axial flux type. Soon, though, radial flux generators and motors became the norm.
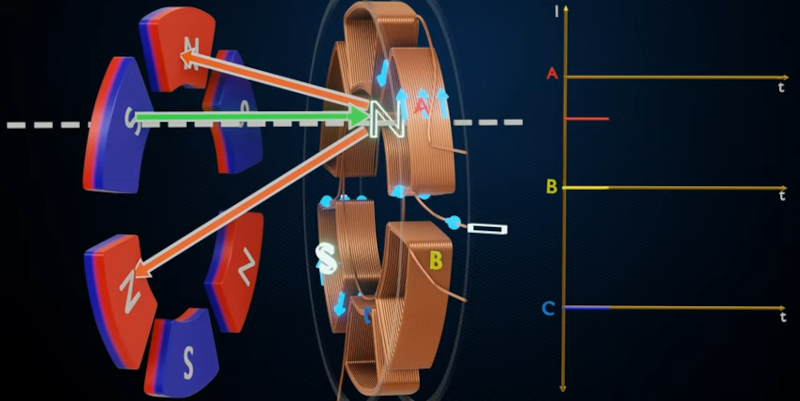
The simple explanation is that in a radial system, the magnetic flux lines are perpendicular to the axis of rotation. In the axial system, the flux lines are parallel to the axis of rotation. There’s more to it than just that of course, and the video below has nice animations showing how it all works.
While these are not very common, they do exist even today. The Lynch motor, for example, is a type of axial flux motor that dates back to 1979. Usually, the impetus for using an axial flux motor is the ease of construction, but with the right design, they can be quite efficient (up to 96% according to the video).
We’ve seen plenty of PCB motors and most of those are axial in design. Not all of them, though.














Like a direct drive turntable?
Why not using more smalest magnets?
Hmmm…. Looks like everything I need is in this stack of old hard drives.
Nice.
Those magnet assemblies and field coils sure would make for a nice axial motor prototipe. Slap them on a 3d printed carcass and rotor, use the ball bearings salvaged from the HDDs and wire it to an ESC
Floppy drives had flat motors.
It’s interesting that they’re proposed as a “new” thing when they’re obviously not.
If they’re great, then they’d be in a product already as there’s been plenty of time to develop them.
In a radial motor, the gap is thin and let’s say at distance R from the centre. Keeping the field and rotational velocity equal, doubling R will double the back EMF.
In an axial motor, the gap extends over a significant radial distance, so the back EMF varies along the gap. Makes optimising it challenging or almost impossible. Consider the case where it’s free running, there the back EMF would probably be about average of the radial gap. Meaning the outer part would be acting as a generator while the inner is acting as a motor. Fun!
Now you could design a motor with decreasing magnetic field as the radius increases, but that goes against the grain of having a nice strong field everywhere.
If back EMF can’t be used, what about an encoder and a lookup table? Would that be able to do the job?
Similar “stacked” magnet/coil configurations were used as generators in DIY wind turbines for years, if not decades. Especially among “free energy” crowd. The only difference was that amateur constructions usually didn’t have cores for coils. So I smell some bovine droppings…
Amateurs have built Brushless DC three phase Axial motors with Ferrite cores.
https://www.youtube.com/watch?v=P3ECmh6AG84
https://endless-sphere.com/forums/viewtopic.php?f=30&t=97860
A good whing about axial flux motors is that you can make them coreless, i.e. without using iron. And combine it with a halbach array config of the permanent magnets. This achives a lighter motor with a higher torque/weight ratio.
Isn’t the axial force on the (thin) plates, leading to bending stress, a mayor challenge in the mechanical design, that is not present in radial flux motors?
In reality it is the same problem, just presented in different form. Radial motors cope with it with thanks to the cilindrical shape, that will resist very well if the stress is uniform around the body, but centrifugal forces on the rotor are a real problem that poses a threat at higher rpm, as it deforms the rotor and in case of a inrunner will cause the rotor to touch the carcass, an outrunner will have the gap widened, wich lowers efficiency.
On the axial motor the control circuitry should do its job with FOC to maintain the force always tangent to the motion, it cant do it perfectly, but it will mitigate most of the stress still. A second magnet disc on the other side might help the problem.
Isn’t this a situation where you’d run the motor at simply lower RPMs and used reduction between it’s output and the useful load to increase the RPM to where it needs to be?
as we talk about permanent magnet exited machines in both cases, the “control circuitry” has almost no means to keep the force tangent to the motion. The force generated perpendicular to the air gap is almost independent from the current in the coils, and only depends on the magnets, iron and gap length. Therefore the force trying to close the air gap is also almost constant. And in any case much bigger than the tangential force generated by the coils. In radial flux machine the “gap closing force” is inducing radial tension stress in the inner part, and tangential compression in the outer part. In the simplest axial flux machine (one rotor, one stator), the gap closing force will induce bending stress. And: Centrifugal forces will be a problem for the axial flux rotor to. If the rotor of a typical fractional horse power radial flux machine is deformed until it touches the stator, it’s not the touching that’s the problem, but the torn apart rotor.
The Lynch motor seems unnecessarily elaborate in design. Kollmorgen Servo Drive™ motors have simple disc rotors. They have been around for decades, and have many advantages. In particular, they have a spectacular torque to inertia ratio. How suitable their bigger ones are for vehicles and aircraft, I don’t know.
This video shows an older Agni Motor (the current company where Lynch works in India) https://youtu.be/oCyExNYobtM?t=18 (0:18) or https://youtu.be/yceLVO1MuKo?t=177 (2:54)
8 carbon brushes (8 permanent magnets) and about ~120 commutators.
> seems unnecessarily elaborate in design
I was looking at the design and thinking the total opposite. The position of the motor determines through the brushes, in this case 8, which coils are energised, the control system is built into the design. There is no complex electronics to monitor the position and change the phase depending on the current speed. Less points of failure, I was thinking that it is elegant in it’s pure simplicity.
sorry 16 permanent magnets, 8 either side of the coil.
>the control system is built into the design
Brushed DC motors need the commutation timing to be variable depending on the speed and torque. The trouble is that the magnetic field inside the motor twists as it reacts with the applied current, so the timing should change depending on the load condition. Any fixed brush motor can only be optimized to run well in one direction at one speed and/or torque condition. You pick the good operating point and assume the motor always runs that way – which if fine for pumps and fans etc. but not for vehicles or lifting machines and others with variable loads.
That’s what the guy is doing in the video. This fixed manual adjustment doesn’t do away with the need to monitor and adjust phases – it simply trades off efficiency and longevity by having no control system whatsoever. Nothing is adjusted according to conditions by the motor itself. A more optimized motor should have a mechanism to twist the commutator according to measurement, or an extra set of field coils that can be energized to cancel the twist. Neither is simple or elegant.
See brushless esc’s used in RC vehicles. The sensor type adjusts timing on the fly as speed increases. Brushed motors have no business in EV engineering due to wear, efficiency, timing issues you pointed out, etc.
New esc controllers are using FOC, fascinating low speed characteristics which is great for wheel motors without any gearing which every current EV car in production has some gear reduction which adds weight and complexity. I see why these axial Flux motors are a perfect fit for aircraft.
as the power density of any electrical machine is proportional to maximum speed, the weight added by the gear is more than offset by the saved weight of the motor. Also typical gear materials (steel) ist cheaper than typical motor materials (stell, copper and magnets), so this also reduces cost.
Interesting. Has anyone heard of a axial flux induction motor?
The properties of axial flux motors that make them efficient also tend to make them very low inductance, i.e. no core material. As a result, it’s difficult to induce strong fields out of phase enough to push against.
The problem for aircraft is more the weight of the electrical source (batteries) than the weight of the motor.
Were these abandoned for not working in brushed motors or something else that would make them more practical now?
I’ve built an axial flux alternator during a brief and cut-short foray into wind-power tinkering. They are basically a motor as well, only difference being whether the energy flows into or out of them.
The typical basic windmill config is as follows: 2 rotor plates with alternating N-S magnets, with the opposite plate’s magnets arranged so that N faces S and they strongly attract, surround a stator plate with coils, usu. connected for 3 phase output which is then rectified. The reason no cores are used is that they would make the alternator “cog”, or stick in a position due to the magnets attracting the cores, thus increasing the wind speed needed to start the blades spinning. Since the coils are static no brushes are needed.
Way easier to build than a radial flux alternator/motor, and fun and enlightening to boot. With a well designed driver, regen braking is as simple as changing the switching sequencing/timing.
Wells
I designed a PCB stator for an axial solar car motor back in 2009 or so. It was a monster. I was working with a local PCB fab specializing in heavy copper, and I asked them what their physical limits were beyond their design rules. The final design called for 24 layers of 8oz copper, with about 90% fill. Each winding consisted of 4 turns, and each turn consisted of 4 separate conductors that barrel rolled on each pole, to minimize eddy current losses.
The first couple production attempts caused some problems for the fab. The plates were heavier than anything, and damaged their conveyor belts. They had to figure out how to peck drill for the first time. Unfortunately the first completed stack had alignment issues. The fab enjoyed the project, though, as an excuse to really dial in their heavy copper processes.
Have a look at Novatorque motors. Axial flux design in a radial-looking package with some impressive efficiency characteristics. There is a lot to find just searching “Novatorque”. I don’t know their present commercial status but I found a nice writeup at https://www.smud.org/-/media/Documents/Business-Solutions-and-Rebates/novatorque-final-report.ashx
According to Cruchbase, Novatorque was bought by Regal Beloit in 2016.
https://www.crunchbase.com/organization/novatorque
These reminded me of some old photos I saw on an EV build log page years ago. A bit of googling http://www.mightyboyev.com/5kW%20Printed%20Circuit%20Motors.htm
Details are thin in that section of the site, but the “Printed Circuit” motor described and photographed looks a lot like the Lynch motor
Brushless motors used in the RC hobbies are axial flux mode. There have been some very large ones used in the DIY manned aircraft made by Peter Stripol on YouTube.
If you do happen to care about the science, I have a phd in mechanical engineering (degree specialties in robotics and electrodynamics), and I can tell you this video Lesics posted on axial flux motors is just blatantly incorrect. I have a lot of respect for science youtubers–they really do work their behinds off to provide interesting content that promotes science to the masses, but this was a particularly low effort video. And even independent of this, it is very common for science youtube to absolutely butcher scientific concepts that require a lot of nuance and deep understanding; they often turn into the kind of non-vetted pseudoscience that result in more unfounded scientific myths than they actually solve. One good way to spot this is if the creator actually lists their references–I’m not even asking for scholarly peer reviewed references, but just any reference at all so I can see where they’re getting their information and evaluate it on its own merit.
I don’t subscribe to that channel that posted this video, but youtube did serve it to my feed, and I watch about 5 minutes into it before I couldn’t handle how blatantly silly it was. It only talks about axial motors for the first three minutes, and nearly everything it stated on the topic was incorrect, and everything after that is just generally describing the process of synchronous three phase AC motor power delivery (which can be applied to literally any motor configuration). First torque to weight ratio does not matter for energy transfer, power to weight ratio does. And in the context of planes, thermal efficiency is actually really what controls the design process (though like many engineering endeavours, its very complicated). Torque to weight radio matters in the context of aircraft, not because aircraft demand torque more torque than other classes of vehicles (obviously not true), but because aircraft generally operate in a very narrow powerband once they’re cruising. Thusly, a lot of efficiency can be gained by matching the cruising speed on the properller efficiency curve with the electric motor efficiency band. As practically works out, the efficiency band for most props used on aircraft sizes where electric aircraft actually make economic sense happens to match the efficiency band of torquier-motors than are typically manufactured (this is related to the kV constant that many hobbyists are accustomed to). Summed up, higher torque electric motors (which are generally signficantly less thermally efficient than high speed electric motors btw) ultimately produce more efficiency than a high speed electric motor in practice because the efficiency bands are are matched (a more efficient high speed motor would need to be much larger and/or employ some type of mechanical reduction, both of which add unecessary weight, which impacts efficiency in other parasitic ways). This is true regardless of the technology and/or configuration of the electric motor used.
The argument that axial flux motors are better for airraft might be true if axial flux motors actually made more torque than conventional motors, but there is absolutely no reason to believe this is true. The motor constant is a facet of the configuration of the motor (they can be made to operate in different torque bands depending on space constraints), but generally speaking axial flux motors make less torque in the same amount of space than conventional motors.
Ultimately if you ask anyone who is knowledgable on the subject, axial flux motors are a primitive, simple design that does not scale easily. It is not new technology…Faraday’s original designs were of the axial flux type because these are way easier to make by hand (same reason why PCB motors are a thing–its easy to make small versions). The applied principles of Maxwells equations (and particularly Faraday’s law) are identically shown regardless of whehter the motor is axial or radial. The problem with axial flux motors is they cannot be scaled–spiraling hundreds of turns of copper inside a flat plane that must also structurally handle the torque generated by the motor is extremely difficult to do in comparison to widing lenghts of copper wire around iron flux focusing material in convential motors. That said, some novel methods of lithography manufacturing has opened the door to scalable manufacturing methods of axial flux motors, but these are emerging, and there frankly isn’t a whole lot of reason to believe they’ll supplant convential radial motors.
The primary reason axial flux motors might stand a chance for aircraft is because aixal flux motors have a better power to weight ratio than convential motors (i.e. they’re lighter for the same power output). This might sound good on paper (axial flux motor startups wont shut up about this) because we talk about power to weight ratio all the time on self driving cars, but this is in the context of energy storage (fuel and batteries), not the motor. On an Telsa Model S, the motor is rougly 20-30kg depending on configuration, but the 100kW (315 mile) battery is 625 kg–on an economically viable electric aircraft that would need to travel further at significantly less efficiency (yes, planes are much less efficient than wheeled vehicles–they are subject to the betz limit) this ratio difference between motor and battery weight will become even more exaggerated.
Anyway jury is out on the true efficacy of large scale axial flux motors, and at this point I’ve put more information in my comment than the original article. But the point is be skeptical and don’t believe everything you see on the internet……including my comment I guess.
Excellent information, thank you.
You could only handle about 5 minutes of the video? Dude it was only 6 minutes long lol
this comment should be mandatory reading for every tech journalist writing about an axial motor startup
Wouldn’t it be possible to put some of these in the wheel engines of electric cars to charge the vehicle while it is traveling?
it is possible. what it achieves is another question
“charge while travelling”? Where do you think the energy that’s generated that way is common from?