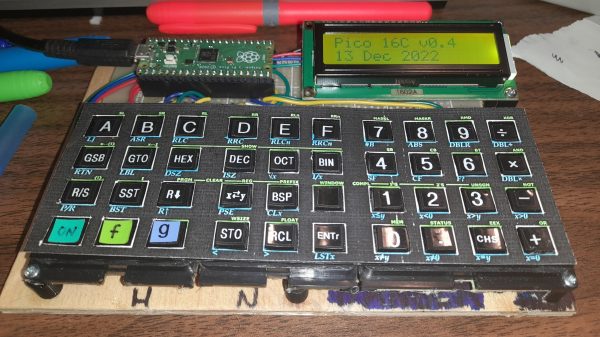
The HP-16C Computer Scientist is much beloved as the only dedicated programmer’s calculator that Hewlett-Packard ever made. Most surviving examples in the world are well-used, and you haven’t been able to order one from HP since 1989. Thus, [K Johansen] set about building a tribute to the HP-16C using modern hardware.
The build relies on a Raspberry Pi Pico as the brains of the operation. As with so many classic HP calculators, it operates in Reverse Polish Notation, and includes the customary stack operations. To serve a programmer well, it’s set up to accept entry in hexadecimal, octal, decimal, and binary formats, and can readily convert between them. Beyond that, it’s equipped with the usual arithmetic operators, as well as bitwise operations like NOT, AND, and so on.
Perhaps what we love most, though, is the keypad. It was all put together with a combination of cheap AliExpress keypads, a label maker, and a laser printer. It’s a wholly DIY job, and a little rough around the edges, but it makes the calculator far easier to use.
It’s not an exact replica of the HP-16C, but the differences in operation are minor.Those wishing to build their own can grab the required files from the project’s Github page. We’ve seen replicas of other classic HP calculators before, too. If you’ve got your own mathematical projects brewing up in the lab, don’t hesitate to send them in to the tipsline!


 The program is known as TwinkleFOX, and relies on the popular
The program is known as TwinkleFOX, and relies on the popular