Little has to be said about why superconducting materials are so tantalizing, or what the benefits of an ambient pressure, room temperature material with superconducting properties would be. The main problem here is not so much the ‘room temperature’ part, as metallic hydrogen is already capable of this feat, if at pressures far too high for reasonable use. Now a recent research article in Advanced Quantum Technologies by Yakov Kopelevich and colleagues provides evidence that superconducting properties can be found in cleaved highly oriented pyrolytic graphite (HOPG). The fact that this feat was reported as having been measured at ambient pressure and room temperature makes this quite noteworthy.
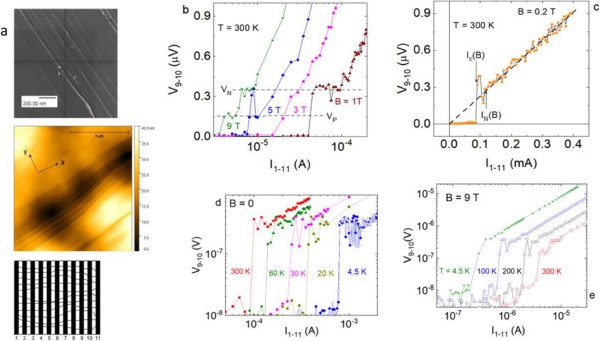
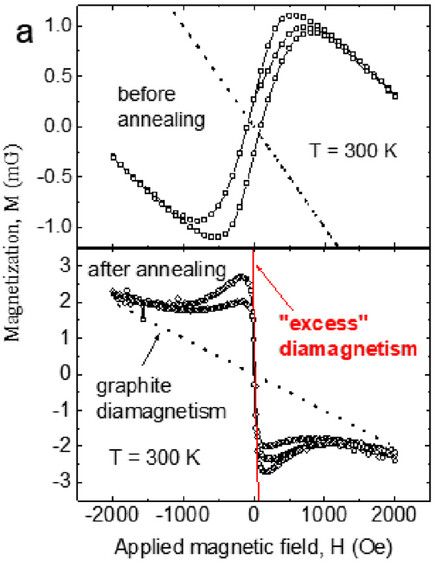
What is claimed is that the difference from plain HOPG is the presence of parallel linear defects that result from the cleaving process, a defect line in which the authors speculate that the strain gradient fluctuations result in the formation of superconducting islands, linked by the Josephson effect into Josephson junctions. In the article, resistance and magnetization measurements on the sample are described, which provide results that provide evidence for the presence of these junctions that would link superconducting islands on the cleaved HOPG sample together.
As with any such claim, it is of course essential that it is independently reproduced, which we are likely to see the results of before long. An interesting part of the claim made is that this type of superconductivity in linear defects of stacked materials could apply more universally, beyond just graphite. Assuming this research data is reproduced successfully, the next step would likely be to find ways to turn this effect into practical applications over the coming years and decades.