Why bother crawling into that tiny sewer tunnel and getting coated in Cthulhu knows what — not to mention possibly getting stuck — when you can roll a robot in there instead? That’s what InspectorBot does. It’s [Dennis]’ entry for The Hackaday Prize and a finalist for our Best Product competition.
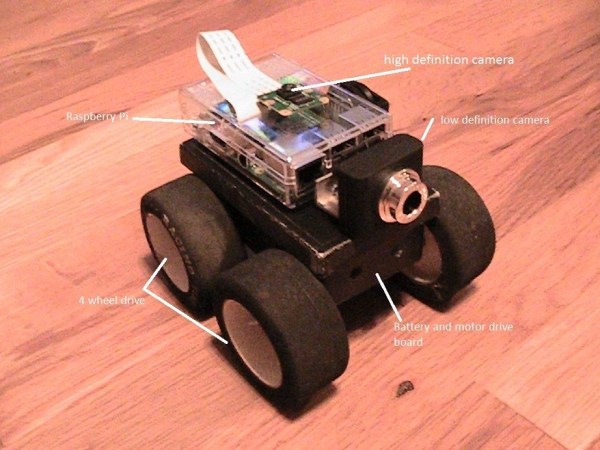
InspectorBot is a low-profile rover designed to check out the dark recesses of sewers, crawlspaces, and other icky places where humans either won’t fit or don’t want to go. Armed with a Raspberry Pi computer, it sports a high-definition camera pointed up and a regular webcam pointing forward for navigation. It uses point-to-point WiFi for communication and rocks all-wheel drive controlled by a pair of L293D motor drivers.
This seems like fertile ground for us. Pipe-crawlers, chimney-climbers, crawlspace-slitherers all sound like they’d be helpful, particularly in conjunction with some kind of computer vision that allowed the robot to notice problems even when the operator does not. Right now, [Dennis] has the chassis rolling and most of the current work is focused on software. Both cameras are now working, allowing the InspectorBot to send forward-looking and upward-looking video back to the operator at the same time. This, alone, is a great advancement of the current crop of Raspberry Pi rovers and adds a lot of functionality to an easy-to-build platform.
So I made an awful, kludgey, “there I fixed it” level repair, and I need to come clean. This is really a case of an ill-advised ground.
My thirteen-year-old daughter asked for help repairing her Macbook charging cable. Macbook chargers really aren’t meant to flex around a lot, and if you’re the kind of person who uses the laptop on, well, the lap, with the charger in, it’s gonna flex. Sooner or later the insulation around the plug housing, where it plugs into the laptop, cracks and the strands of wire can be seen. This type of cable consists of an insulated lead wire surrounded by a stranded ground wire. The problem with this configuration is that the stranded ground also gets flexed until it breaks, one strand at a time, until the cable stops working.
So it was with my daughter’s Macbook cable. I didn’t have the money to buy her a new one, and I figured we could repair the break. We busted out her WLC100 and sat down to get our solder on. She started off working while I supervised, then I took over later on.
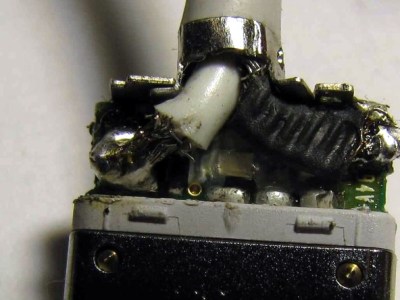
We began by using an Xacto to cut away enough insulation to expose about half an inch of the stranded wire. We pulled the wire away from the insulated lead wire and twisted it into a single stranded wire parallel to the lead wire. Grabbing for the iron, we tinned the ground and soldered a length of 22-gauge solid wire to it. The way the ground connects to the plug is by passing through a conductive ring. My idea was to solder the other end of the 22-gauge wire to the metal ring. Here’s where things started to go wrong. This is, by the way, the part where I took over so you can blame me and not my kid.
My daughter was using the WLC100’s default tip. I should have grabbed my own iron, a WES51, or at least swapped in its ninja-sharp tip. The WLC100’s default tip is a big fat wedge and it was too big to put next to the plug, and the conductive ring quickly got covered in melted plastic and I couldn’t solder anything to it. Worse, I had accidentally burned through the insulation protecting the lead wire, and had to cover it in electrical tape.
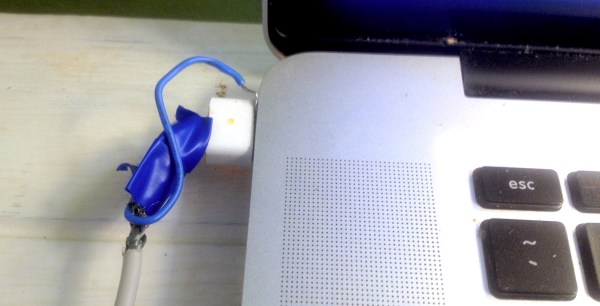
What now? We were left with not being able to use the cable at all. One option was to wait until the goop had cooled and burnish it clean with a Dremel, then attempt to re-solder using an appropriate tip. However, that sounded like a lot of work. The solid wire was still securely soldered to the ground, so instead of trying to attach it to the cable side of the plug, I could connect it to the computer side, by shoving it into the socket alongside the plug. The business end of the plug has a big silver ground surrounding small gold positive leads, and touching the ground with the wire should work just fine, right?
It did. The computer charged up as happy as you’d like. And yet, I was left with the distinct feeling the solution could have been, I don’t know, cleaner. Certainly, the iFixit route shown here comes out much cleaner by sliding off the housing, clipping the damaged wire, and beginning anew. Clean as this is, it’s just waiting to happen the same way again.
So, brethren and sistren, lay on with brickbats and tell what I did wrong. What approaches have you used to fix cables broken where they meet the plug housing, and how do you improve the situation for the future?
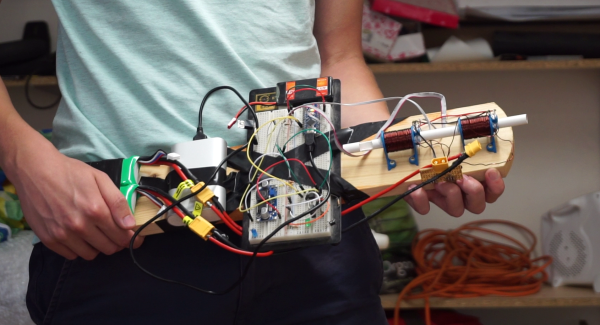
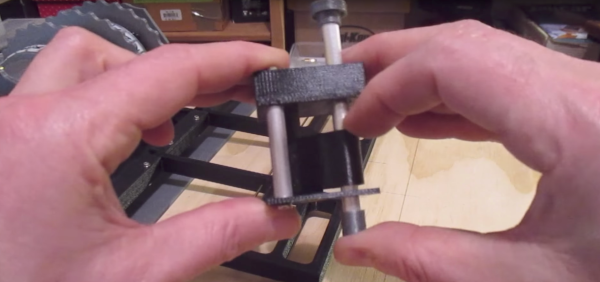
Whenever we see a coil gun project on the Internet, it seems to involve a bank of huge capacitors. [miroslavus] took a different approach with his gun–he wanted his project to be built without those monster caps.
It’s powered by quadcopter LiPo batteries, 2x 1400 MaH drone batteries wired up in series and triggering 21SWG copper coils that [miroslavus] created with the help of a custom 3D-printed winding rig he designed. The rigs have ridges to help you lay the coils down neatly, and they also have mounts for photodiodes, ensuring the gun knows when it’s loaded.
When triggered, the Arduino Nano activates a pair of IRF3205 MOSFETS with logic signals stepped up to 20V, shooting lengths of 7mm or 8mm steel rod. The gun isn’t exactly creating plasma discharges with its launches, but it’s a fascinating project nonetheless.
Composting serves an important purpose in our society, reusing our food scraps and yard waste to fertilize gardens rather than fill up landfills. Knowing that most people don’t compost, [Darian Johnson] set out to create a Arduino-controlled composting system to make it as simple as possible. It monitors your bin’s moisture, temperature, and gas emissions to ensure it’s properly watered and aerated.
[Darian]’s project combines a MQ4 gas sensor that detects combustible gas, a soil moisture sensor, and a temperature and humidity probe. The nearby water reservoir is monitored by an ultrasonic sensor that keeps track of the water level; a pump triggered by a TIP120 turns on the water. Meanwhile, a servo-controlled vent keeps the air flowing just right.
The Smart Composting System sounds like it would be useful to home gardeners; it’s a Best Product finalist in the 2017 Hackaday Prize.
[Radu Motisan] is working on a small rover whose primary trick is being able to identify its owner. Robo-Dog is his proof of concept, a rover that uses five ultrasonic sensors to move toward the nearest obstruction. Obviously, this isn’t the same as being able to recognize one person from another, but it’s a start.
The sensors were home-built using ultrasonic capsules soldered into a custom board, with the tube-shaped enclosures made out of PVC pipe. He made an ultrasonic beacon that uses a 556 timer IC to emit 40 KHz pulses so he can get the hang of steering the robot purely with sound. If that fails, Robo-Dog also has an infrared proximity sensor in front. All of it is controlled by an ATmega128 board and a custom H-bridge motor controller.
[Radu] has been fine-tuning the algorithm, making Robo-Dog move faster to catch up with a target that’s far away, but slower to one that’s close by. It compares the readings from two sensors to compute the angle of approach.
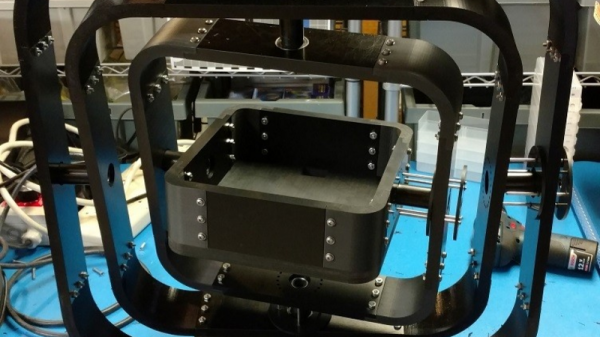
[Tim Good] built a 3-axis gimbal out of 3D-printed and machined pieces, and the resulting design is pretty sweet, with a nice black-on-black look. He machined the flat pieces because they were too long to be printed in his 3D-printer.
The various axes swivel on four bearings each, and each ring features a manual locking mechanism made out of steel stainless pins that immobilize each axis. The gimbal operation itself appears to be manual. That said, [Tim] used 12-wire slip rings to power whatever camera gets mounted on it–it looks like the central enclosure could hold a camera the size of a GoPro.
[Tim] has shared his design files on Thingiverse: it’s a complicated build with 23 different files. This complexity got us wondering: aren’t there two pitch axes?
[Asciimation], who previously created an Enigma Machine wristwatch, decided to go all-in and make a 3D-printed Enigma machine. Not a perfect replica, but rather an improved version that works the same but doesn’t concern itself with historical accuracy. For instance, the current step involves building the keyboard. Rather than trying to re-create the spring-and-pin method of the original, he simply swapped in readily available, double-throw micro switches.
This project has a tremendous amount of fascinating detail. [Asciimation] did his research and it shows; he downloaded blueprints of the original and used hacked digital calipers to precisely measure each rotor’s teeth, so that it could be re-created for printing. He even re-created the Enigma font to ensure that his printed rotor wheels would look right–though in doing so he discovered that the original machine used one typeface for the keyboard, one for the wheels, and one for the indicator lamps.
We previously published [Asciimation]’s Enigma machine wristwatch project, where he simulated the functionality of an Enigma with an Arduino.