Weather stations are a popular project for experimenting with various environmental sensors, and for wind speed and direction the choice is usually a simple cup anemometer and wind vane. For [Jianjia Ma]’s QingStation, he decided to build another type of wind sensor: An ultrasonic anemometer.
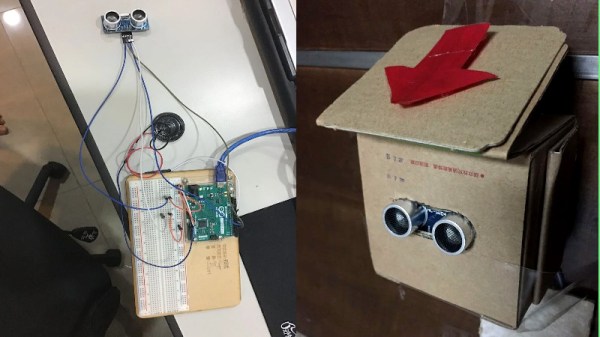
Ultrasonic anemometers have no moving parts but come at the cost of significantly more electronic complexity. They work by measuring the time it takes for an ultrasonic audio pulse to be reflected the receiver across a known distance. Wind direction can be calculated by taking velocity readings from two ultrasonic sensor pairs perpendicular to each other and using a bit of simple trigonometry. For an ultrasonic anemometer to work properly, it requires a carefully designed analog amplifier on the receive side and a lot of signal processing to extract the correct signal from all the noise caused by secondary echoes, multi-pathing, and the environment. The design and experimentation process is well-documented. Since [Jianjia] does not have access to a wind tunnel for testing and calibration, he improvised by mounting the anemometer on his car’s roof and going for a drive. This yielded readings that were proportional to the car’s GPS speed, but a bit higher. This might due to a calculation error, or external factors like wind, or disturbed airflow from the test car or other traffic.
Other sensors include an optical rain sensor, light sensor, lighting sensor, and a BME280 for air pressure, humidity, and temperature. [Jianjia] plans to use the QingStation on an autonomous boat, so he also included an IMU, compass, GPS, and a microphone for environmental sounds. The fact that none of the sensors have moving parts is a major advantage for this use case, and we look forward to seeing the boat project. All the hardware and software are open-source and available on GitHub.
Continue reading “Open Source Ultrasonic Anemometer” →