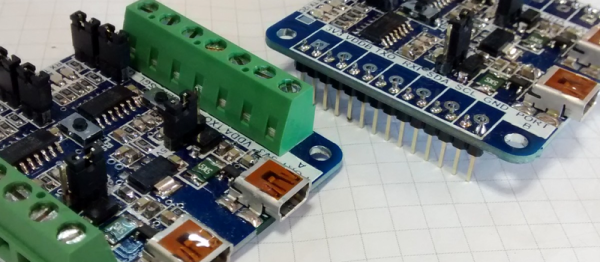
[Jesus Echavarria] sent us a link to this cute little tool that he’s built. It’s a dual USB-to-I2C-or-UART adapter, with a few more oddball features thrown in for good measure. If you were electronics Batman, you’d have this on your utility belt.
[Jesus] originally designed the board because he wanted to sniff a bi-directional UART conversation using his computer, and get it all done in inexpensive hardware with minimal fuss. So he looked to the Microchip MCP2221 chip, which is an inexpensive USB to serial and I2C chip, but with some extras. In particular, it’s got four GPIOs, a ten-bit ADC and a five-bit DAC with selectable reference voltage, and it’s all controllable over USB. And [Jesus]’s board has two of them.
Implementing USB on a microcontroller isn’t always that much fun, so we can see why he took the straight-ahead hardware approach. And as a side benefit, he gets all the other kooky functionalities that the chip brings. And we have been introduced to what looks like a neat chip to use in USB and microcontroller projects. We’re going to put one in our next random chip order.