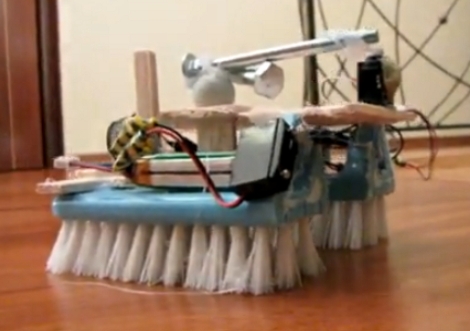
This is [Lee von Kraus’] new experimental propulsion system for an underwater ROV. He developed the concept when considering how one might adapt the Bristlebot, which uses vibration to shimmy across a solid surface, for use under water.
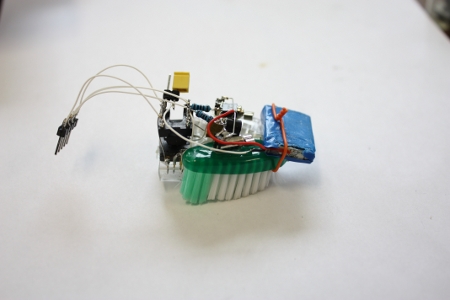
As with its dry-land relative, this technique uses a tiny pager motor. The device is designed to vibrate when the motor spins, thanks to an off-center weight attached to the spindle. [Lee’s] first experiment was to shove the motor in a centrifuge tube and give it an underwater whirl. He could see waves emanating from the motor and travelling outward, but the thing didn’t go anywhere. What he needed were some toothbrush bristles. He started thinking about how those bristles actually work. They allow the device to move in one direction more easily than in another. The aquatic equivalent of this is an angled platform that has more drag in one direction. He grabbed a bendy straw, using the flexible portion to provide the needed surface.
Check out the demo video after the break. He hasn’t got it connected to a vessel, but there is definitely movement.
Continue reading “‘Vortex-drive’ For Underwater ROV Propulsion”