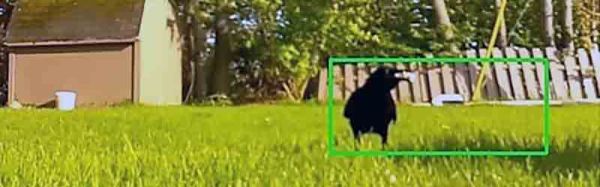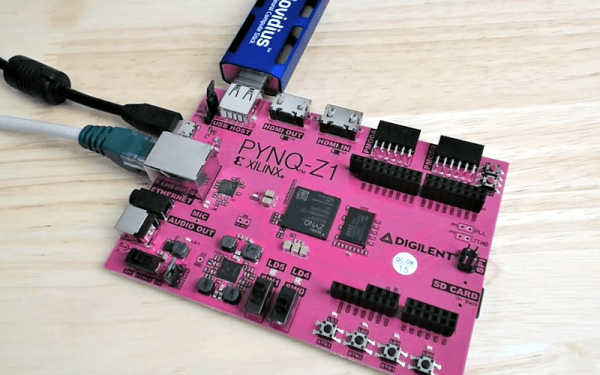
They probably weren’t inspired by [Jeff Dunham’s] jalapeno on a stick, but Intel have created the Movidius neural compute stick which is in effect a neural network in a USB stick form factor. They don’t rely on the cloud, they require no fan, and you can get one for well under $100. We were interested in [Jeff Johnson’s] use of these sticks with a Pynq-Z1. He also notes that it is a great way to put neural net power on a Raspberry Pi or BeagleBone. He shows us YOLO — an image recognizer — and applies it to an HDMI signal with the processing done on the Movidius. You can see the result in the first video, below.
At first, we thought you might be better off using the Z1’s built-in FPGA to do neural networks. [Jeff] points out that while it is possible, the Z1 has a lower-end device on it, so there isn’t that much FPGA real estate to play with. The stick, then, is a great idea. You can learn more about the device in the second video, below.