Many devices use infrared (IR) as a signalling medium like, for example, RGB LED strip controllers
modules and some TV controllers. Often times these signals aren’t meant for secure applications which means the functionality can be reproduced by simply replaying back the received signal verbatim. Sometimes, enterprising hackers want to reverse engineer the IR signals, perhaps to automate some tasks or just to get a better understanding of the electronics we use in our everyday life. To help in this effort, [dilshan] creates an open source hardware IR cloner device, capable of snooping IR signals and retransmitting them.
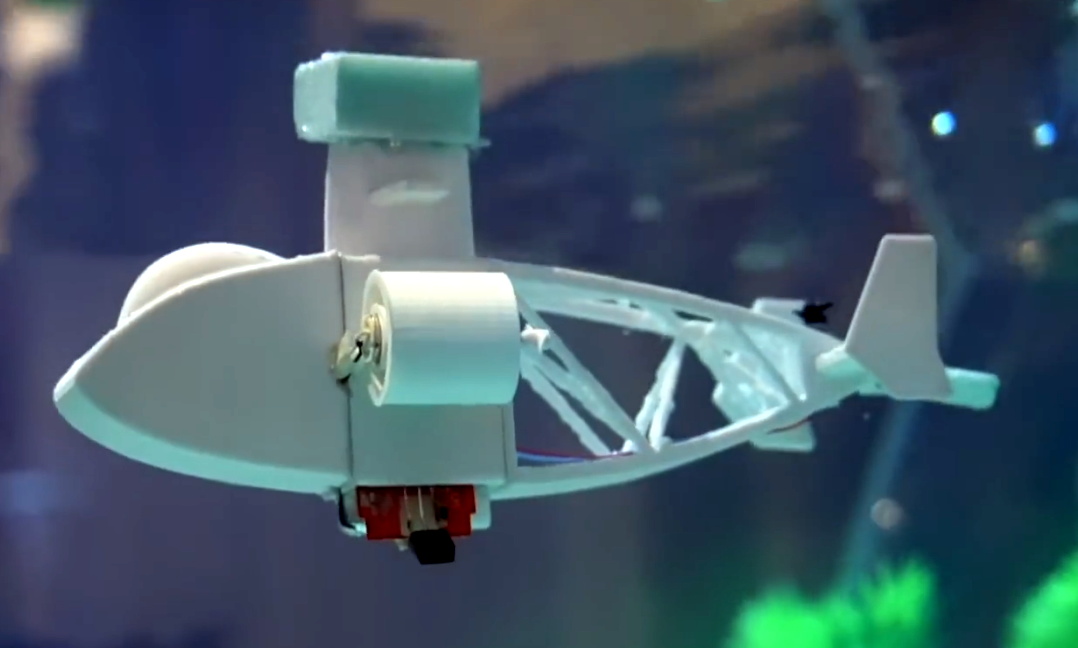
We often think of submarines as fairly complex pieces of machinery, and for good reason. Keeping the electronics watertight can naturally be quite difficult, and maintaining neutral buoyancy while traveling underwater is a considerable engineering challenge. But it turns out that if you’re willing to skip out on those fairly key elements of submarine design, the whole thing suddenly becomes a lot easier. Big surprise, right?
That’s precisely how [Peter Sripol] approached his latest project, which he’s claiming is the world’s smallest remote control submarine. We’re not qualified to say if that’s true or not, but we were certainly interested in seeing how he built the diminutive submersible. Thanks to the fact that it started life as one of those cheap infrared helicopters, it’s actually a fairly approachable project if you’re looking to make one yourself.
The larger prototype version is also very cool.
After testing that the IR communication would actually work as expected underwater, [Peter] liberated the motors and electronics from the helicopter. The motor’s wires were shortened, and the receiver PCB got a slathering of epoxy to try and keep the worst of the water out, but otherwise they were unmodified.
If you’re wondering how the ballast system works, there isn’t one. The 3D printed body angles the motors slightly downwards, so when the submarine is moving forward it’s also being pulled deeper into the water. There aren’t any control surfaces either, differential thrust between the two motors is used to turn left and right. This doesn’t make for a particularly nimble craft, but in the video after the break it certainly looks like they’re having fun with it.
Looking for a slightly more complex 3D printed submersible vehicle? Don’t worry, we’ve got you covered.
The Syma S107G is a venerable stalwart of the micro helicopter market. Affordable, robust, and ubiquitous, the S107G relies on infrared to receive its control signals. Emboldened by the prior work of others, [Robert] set out to control his with a Playstation 2 controller.
In this project, [Robert] is standing on the shoulders of giants, so to speak – we’ve seen others reverse engineer the S107G’s communications protocol before. [Robert] combined the efforts of several others to understand how to send commands to the helicopter, including use of two separate channels for controlling two at once.
With the knowledge of the necessary protocols, it’s then a matter of hooking up 3 LEDs in a somewhat unconventional series arrangement with a 9 volt supply, to be switched by an Arduino hooked up to a computer. A Javascript application running on the computer reads the state of a Playstation 2 controller, and spits it out over serial to the Arduino, which flashes the LEDs.
It’s not the neatest, most lightweight way of building a new controller for your remote control toy, but it does show how quickly one can throw together a project in a weekend by combining modern hardware and software tools. Plus, it’s a great learning experience on a platform that’s been experimented with the world over.