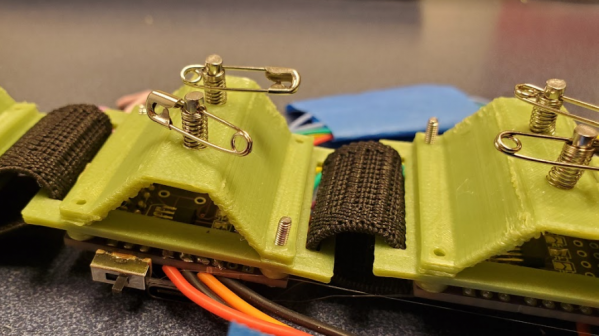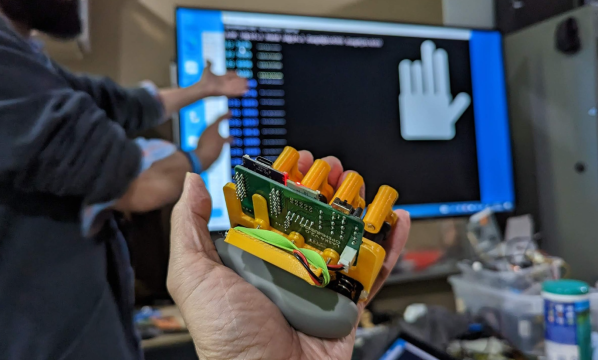
What do you get when you combine an ESP32-S2, a machine-learning model, some Hall effect sensors, and a grip exercise toy? [Turfptax] did just that and created LASK4. The four springs push down pistons with tiny magnets on them. Hall effect sensors determine the piston’s position, and since the springs are linear, the ESP32 can also estimate the force being applied on a given finger. This data is then streamed to a nearby computer over TCP. A small OLED screen shows the status, and a tidy 3D printed case creates a comfortable package.
So other than an excellent musical instrument, what is this good for? First, it creates well-labeled training data when combined with what is collected by the muscle sensor band we discussed previously. The muscle band measures various pressure sensors radially around the forearm. With just a few minutes of training data, the system can accurately predict finger movement using the random forest regression model.
What would you use it for? It’s considered a somatosensory device, so it can be used for physical therapy when undergoing hand rehabilitation, as it provides feedback during sessions. Or it could be used to train a controller efficiently.
It’s an exciting project on GitHub under an OpenCERN hardware license. The code is in MicroPython, and the PCB and STL files are included. We’re looking forward to seeing what else comes from the project. After the break, there’s a progress update video.
Continue reading “Hackaday Prize 2023: LASK4 Watches Those Finger Wiggles”