To adequately study a body of water such as a lake, readings and samples need to be taken from an array of depths and locations. Traditionally this is done by a few researchers on a small boat with an assortment of tools that can be lowered to the desired depth, which is naturally a very slow and expensive process. As the demand for ever more granular water quality analysis has grown, various robotic approaches have been suggested to help automate the process.
 A group of students from Northeastern University in Boston have been working on Project Albatross, a unique combination of semi-autonomous vehicles that work together to provide nearly instantaneous data from above and below the water’s surface. By utilizing open source software and off-the-shelf components, their system promises to be affordable enough even for citizen scientists conducting their own environmental research.
A group of students from Northeastern University in Boston have been working on Project Albatross, a unique combination of semi-autonomous vehicles that work together to provide nearly instantaneous data from above and below the water’s surface. By utilizing open source software and off-the-shelf components, their system promises to be affordable enough even for citizen scientists conducting their own environmental research.
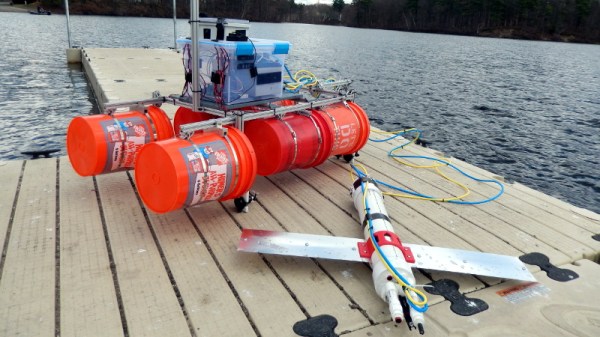
The surface vehicle, assembled from five gallon buckets and aluminum extrusion, uses a Pixhawk autopilot module to control a set of modified bilge pumps acting as thrusters. With ArduPilot, the team is able to command the vehicle to follow pre-planned routes or hold itself in one position as needed. Towed behind this craft is a sensor laden submersible inspired by the Open-Source Underwater Glider (OSUG) that won the 2017 Hackaday Prize.
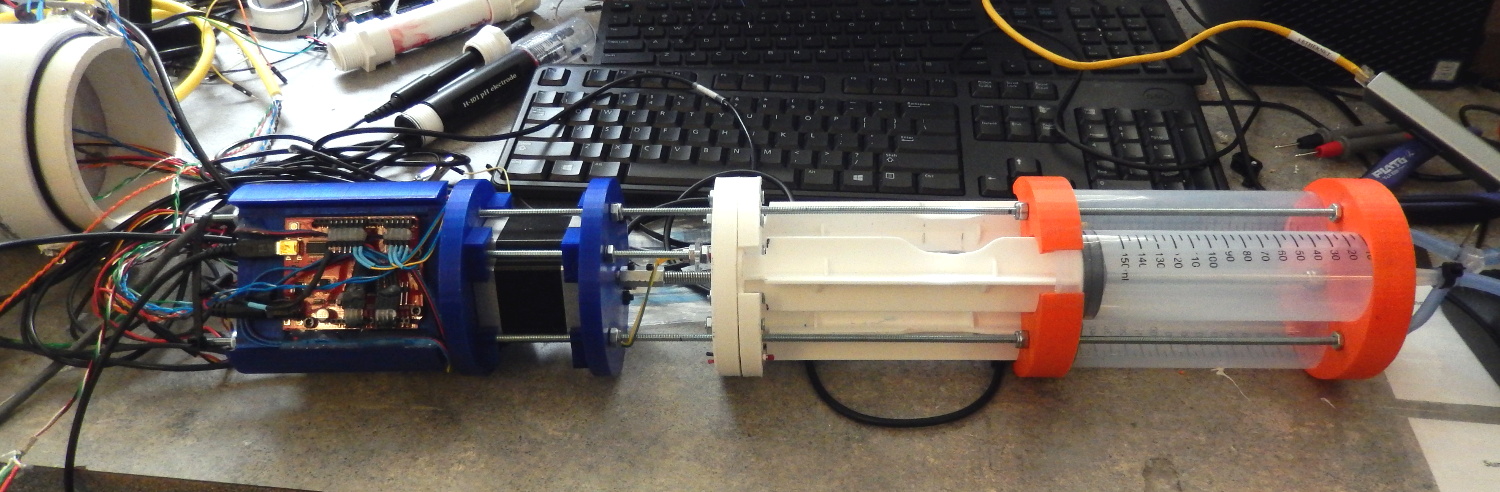
Using an array of syringes operated by a NEMA 23 stepper motor, the glider is able to control its depth in the water by adjusting its buoyancy. The aluminum “wings” on the side of the PVC pipe body prevent the vehicle from rolling will moving through the water. As with the surface vehicle, many of the glider components were sourced from the hardware store to reduce its overall cost to build and maintain.
The tether from the surface vehicle provides power for the submersible, greatly increasing the amount of time it can spend underwater compared to internal batteries. It also allows readings from sensors in the tail of the glider to be transmitted to researchers in real-time rather than having to wait for it to surface. While the team says there’s still work to be done on the PID tuning which will give the glider more finely-grained control over its depth, the results from a recent test run already look very promising.














