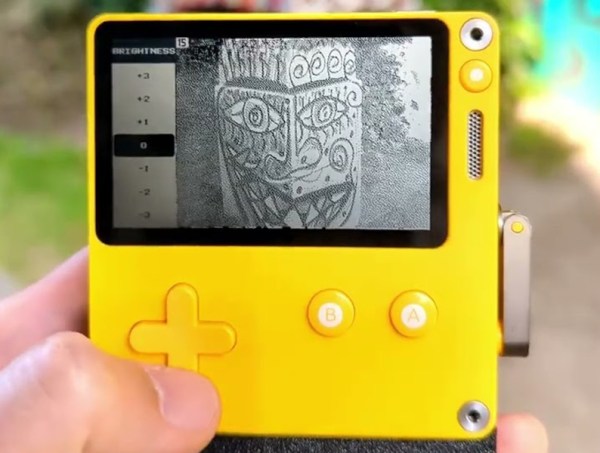
The Game Boy Camera, while perhaps not the most technologically advanced piece of equipment, left a huge mark on video game and electronics culture. The grayscale photographs are still highly prized, and there are an untold number of projects which interface with original hardware to download authentic Game Boy Camera pictures to modern computers. There are others that look to recreate the feel and style of these images, and the latest comes to us on a Game Boy-like platform as well, the Playdate.
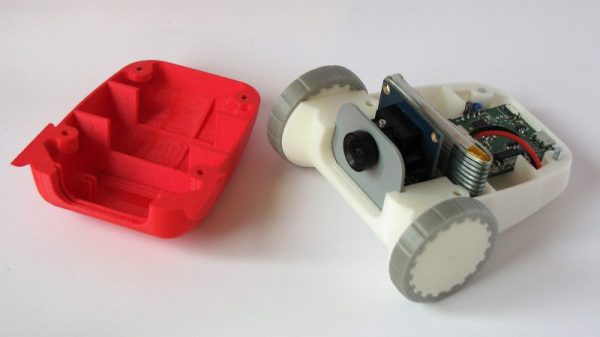
[t0mg] is the creator of this project, utilizing a OV7670 camera module sending data to a Teensy 4.1 which interfaces with the Playdate via USB. The images recorded on the Playdate are 1-bit, slightly different than the 2-bit images the Game Boy Camera was capable of. The case of the camera also physically matches up well with the small console, using magnets to secure it to the device either in normal camera mode, in reverse for selfie mode, and can also support the console in “cover” mode as a way of storing the console to protect the screen. A companion application needs to run on the Playdate to get this all up and running, but with that and a battery plenty of retro-style images are ready to be captured.
All of the source for this project is available on the project’s GitHub page for anyone ready to experience some nostalgia or just experiment with a small camera like this. It’s a clean build that takes advantage of the Playdate’s open-source nature, through which we’ve seen the console turned into a typewriter and inspire other builds like this one-off handheld with a crank-style controller.