As someone notorious for not doing things the old-fashioned manual way, we’re not sure by [Shane] of Stuff Made Here was thinking when he promised to send out a few hundred handwritten letters. Predictably he built an automated production line for the task. Video after the break.
With “handwritten” and “automated” not being particularly compatible, [Shane] set out to create a robot to create believable handwritten letters, which is significantly harder than it may seem at first glance. It turns out that turning your handwriting into a font is too consistent to be believable, which led down the rabbit of generated handwriting. [Shane] first spend a ridiculous amount of time trying to implement a machine learning model for the task, only to find there’s already an open source library good enough to fool a forensic handwriting expert.
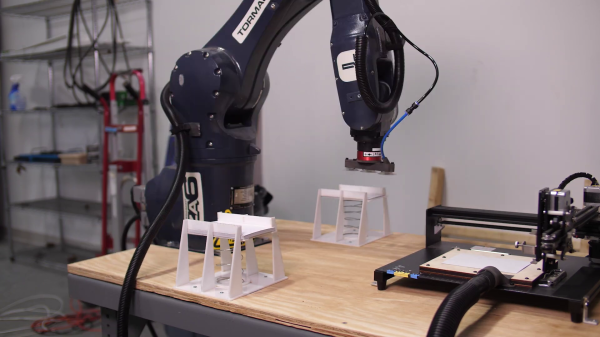
On the robot side, [Shane] used a pen plotter from Amazon that’s it’s actually cheaper than building one from scratch. With the “handwriting” taken care of, [Shane] set up an automated loading system with the industrial robot arm he also used for his CNC chainsaw. The feeders for the empty and full postcards are 3D printed with a spring-loaded mechanism to keep the top card at the same height all the time.
Although this project contained less custom hardware and software than [Shane’s] other projects, it served as an excellent reminder that it’s unnecessary to reinvent the wheel when building a car. It’s easy to get caught up in the small details of a project that don’t matter much in the final implementation and usage.
Continue reading “Automate Handwritten Postcards With Robots”