What’s the best way to turn a high-powered brushless DC motor optimized for hobby use into a decent low-RPM generator? Do you take a purely mechanical approach and slap a gearbox on the shaft? Or do you tackle the problem electrically?
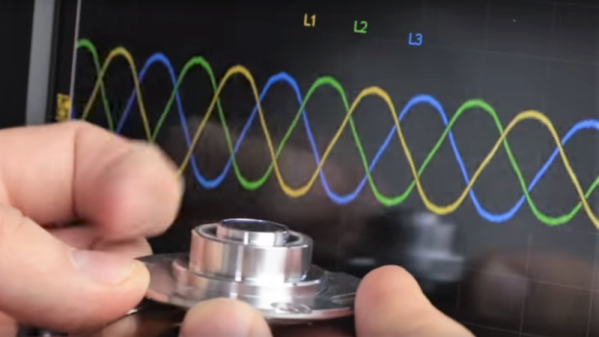
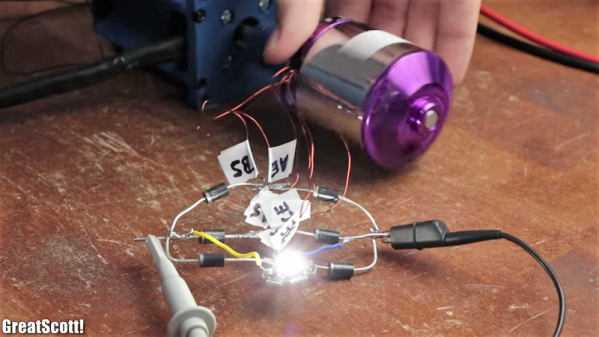
The latter approach is what [GreatScott!] settled on with his BLDC rewinding and rewiring project. Having previously explored which motors have the best potential as generators, he knew the essential problem: in rough terms, hobby BLDCs are optimized for turning volts into RPMs, and not the other way around. He started with a teardown of a small motor, to understand the mechanical challenges involved, then moved onto a larger motor. The bigger motor was stubborn, but with some elbow grease, a lot of scratches, and some destroyed bearings, the motor was relieved of both its rotor and stator. The windings were stripped off and replaced with heavier magnet wire with more turns per pole than the original. The effect of this was to drive the Kv down and allow better performance at low RPMs. Things looked even better when the windings were rewired from delta to wye configuration.
The take-home lesson is probably to use a generator where you need a generator and let motors be motors. But we appreciate [GreatScott!]’s lesson on the innards of BLDCs nonetheless, and his other work in the “DIY or buy?” vein. Whether you want to make your own inverter, turn a hard drive motor into an encoder, or roll your own lithium battery pack, he’s done a lot of the dirty work already.
Continue reading “Rewound And Rewired BLDC Makes A Half-Decent Generator”