[Yeo Kheng Meng] had a question: what is the oldest x86 processor that is still supported by a modern Linux kernel? Furthermore, is it actually possible to use modern software with this processor? It’s a question that surely involves experimentation, staring into the bluescreen abyss of BIOS configurations, and compiling your own kernel. Considering Linux dropped support for the 386 in 2012, the obvious answer is a 486. This supposition was tested, and the results are fantastic. You can, indeed, install a modern Linux on an ancient desktop.
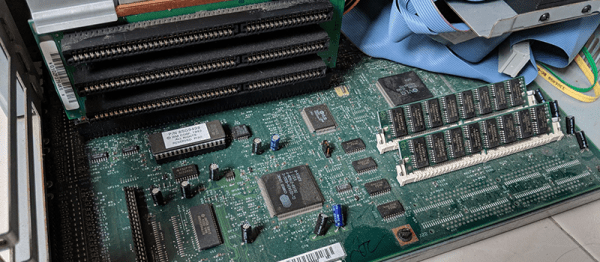
This project got its start last month at a Super Silly Hackathon where [Yeo] and [Hui Jing] installed Damn Small Linux on an ancient IBM PS/1 desktop of 1993 vintage. The hardware consists of an AMD 486 clone running at 133MHz, 64 MB of RAM, a 48x IDE CDROM drive (wow!), a floppy emulator, a Sound Blaster, 10Mbps Ethernet card, and a CompactFlash to IDE adapter. By any account, this is a pimped-out rig for 1993 that would have cost more than a car at the time. The hardware works, but can you run a modern Linux kernel on it?
[Yeo] decided to install the Gentoo x86 minimal installation, but sanity and time constraints meant compiling a kernel on a 486 wasn’t happening. That was done on a modern Thinkpad after partitioning all the drives, verifying all the compilation parameters, and configuring the kernel itself. The bootloader is LILO (Grub2 didn’t work), but for the most part, this is entirely modern software running on a 25-year-old machine. The step-by-step instructions for becoming a /g/entooman on a 486 are available on GitHub.
The entire (boring) boot process can be seen in the video below. One interesting application of this build is that the 486 does not support out-of-order execution, making this completely safe from Meltdown and Spectre attacks. It’s an impressive retrocomputing achievement that right now could not be more timely.
Continue reading “Go Retro To Build A Spectre And Meltdown-Proof X86 Desktop”