There’s something fascinating about humanoid robotic hands, if only because of how they are such close approximations of our own hands. One could almost picture them with tendons and skin covering them. Sadly, making your own is quite prohibitive because in addition to being complex bits of machinery, making one of these marvels of engineering is usually rather expensive.
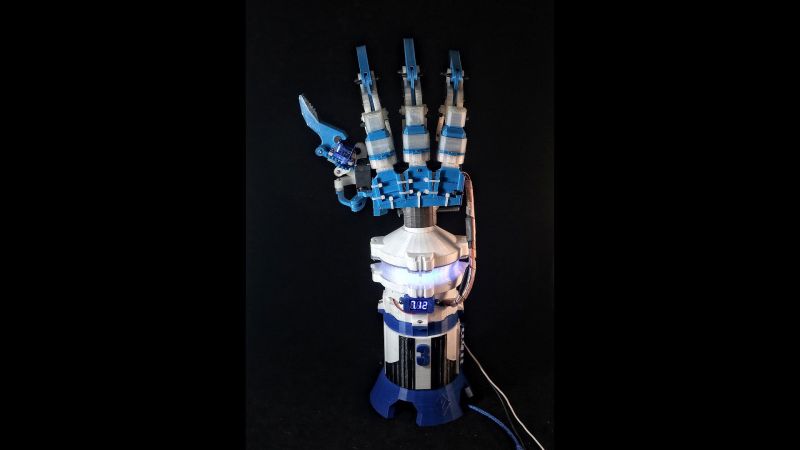
[Gray Eldritch]’s Humanoid Robot Arm project seeks to fix both points, by providing a ready to print project. All it takes is about a kilogram of PLA filament, some TPU filament, five MG996r servos (or equivalent), an SG90 servo or similar, an Arduino Uno board and a few other bits and pieces. This should result in a robotic arm with hand as covered in the video of the Mark 3 version that is embedded after the break.

















I’d probably change the title to “robotic hand” (maybe include forearm?). Would be more representative of what is discussed here. When I think robotic arm, I imagine more something like this: https://tinyurl.com/y2v7t2s2
Cool stuff regardless! :)
Its interesting to the see how ‘limiting’ robotic hands are compared to the real thing when comparing range of motion, noise, etc. Noiselessly I can touch my thumb to the little finger, or close completely as a fist, or separate the fingers in a Spock ‘V’, etc. Marvel of engineering the hand is.
Cool Stuff regardless as said above! A ‘lot’ of work to get to that point!
I think we need muscle wire for that dexterity.
https://youtu.be/vOLvFhdkLmA
Neat Art project anyway.
I use some ultrasonic motors that are entirely silent — quieter than human muscles anyway, which DO make noise: just listen to your (or someone else’s) biceps some day. And I have used 6000 rpm 500W brushless DC servos that are nearly inaudible in an office environment. Neither are remotely in the sub-$10 servo class though, so noise is just a matter of engineering or cost.
As for range of motion: this hand has just 5 degrees of freedom (plus another on the wrist). Your hand (probably) has 19 degrees of freedom (and 3 of those of not that useful), plus 3 at the wrist. So it’s just a matter of engineering mechanical complexity, not a fundamental limit of robotics.
But, yes, agreed, it’s amazing what a few hundred million years of intelligent design can muster when it can genetically iterate through billions and billions of trials. I can only hope that our measly meat brains, or the silicon ones we can conjure, can be a bit more efficient than that.
Ya not an arm. Interesting animatronic design of hand. Not really useable robotic effector or prosthetic IMO. Would Like to see some attempt at useability with an arm. Indicated “final” for this iteration prototype so looking forward to more. Thanks for posting.