
ARCTOS is a 6-DOF robot arm based upon 3D printed mechanics running a modified version of GRBL firmware. Let’s get this straight now, the firmware is open source, but the hardware plans are a paid download, but for less than forty euros, we reckon the investment would be well worth it, judging from the quality of the build instructions and the software support already in place.
Looking at the bill of materials, there’s nothing there that is a challenge to source. The mechanical parts and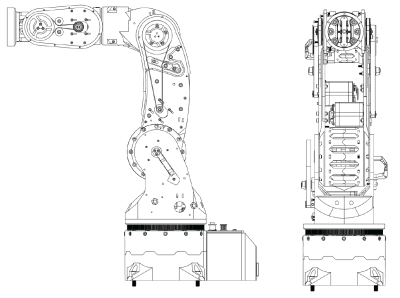 casings are designed to be printed in PLA, requiring 3 kg of filament. The required layer height is 0.28mm, with a 0.4mm nozzle, so should easy to find in any decent hackerspace. The motors are the usual NEMA17 and NEMA23 steppers, paired with GT2 pullies and belts. The only required special parts are a couple of lengths of 4mm smooth stainless rod, and some M4 and M3 threaded rods, all of which many of us would have on hand anyway. The Y-axis and Z-axis both feature a cycloidal gearbox, producing decent torque in a compact format, which the team reckons is sufficient for about 500g of payload capacity. The X-axis uses a simple belt drive since all the load is vertically on the bearing. The remaining three axes (A, B, and C) are also direct belt drive. We suspect that the specified load capacity would have to include any end effector which may be fitted, so that would need to be allowed for in practice, but 500g is pretty healthy for a 3D printed unit.
casings are designed to be printed in PLA, requiring 3 kg of filament. The required layer height is 0.28mm, with a 0.4mm nozzle, so should easy to find in any decent hackerspace. The motors are the usual NEMA17 and NEMA23 steppers, paired with GT2 pullies and belts. The only required special parts are a couple of lengths of 4mm smooth stainless rod, and some M4 and M3 threaded rods, all of which many of us would have on hand anyway. The Y-axis and Z-axis both feature a cycloidal gearbox, producing decent torque in a compact format, which the team reckons is sufficient for about 500g of payload capacity. The X-axis uses a simple belt drive since all the load is vertically on the bearing. The remaining three axes (A, B, and C) are also direct belt drive. We suspect that the specified load capacity would have to include any end effector which may be fitted, so that would need to be allowed for in practice, but 500g is pretty healthy for a 3D printed unit.
On the electronics side of things, a bog standard CNC shield hosts A4988 or DRV8825 stepper driver modules and sits atop an Arduino Mega2560. No mention is made in the BoM of the rotational encoders required for closed-loop operation, but they are clearly present in the build manual. Some documentation polish is required, but there’s nothing too bad that any skilled builder couldn’t cope with. The project GitHub hosts the necessary setup files for running ROS, as well as a simple forward kinematics model for Simulink, which while very basic, is at least a start.
We do like robot walkers, robot arms, and robot worms, a lot. But sticking with just one limb for now, here’s another cracker of a robot arm project, but we suspect out of the price range of most but the dedicated of robot hackers. Don’t want heavy stepper motors, but cheap servo motor accuracy not doing it for you? Checkout this improvement.














Sorry to say M3 and M3 threaded rod aren’t commonly stocked across the pond, but of course can be ordered. Too bad if there isnt an option to use an alternative size like 8-32 or 10-32.
Looks neat, want to build. 3kg of filament is roughly $60 here, plus $60 for plans, and Nema motors. We are getting near $300 if you have to go buy everything.
I meamt M3 and M4 obviously
Really?
https://www.mcmaster.com/products/threaded-rods/thread-size~m3/
Like I say, can I get it at the local hardware store? Maybe in 100mm lengths for $6 each. Definitely not in 1M lengths for any reasonable price. I didn’t write the rules, I was in maybe 1st grade the last time I heard of a big push to go metric in this country :’/
It didn’t take, so now we have both, but not equally, its mostly still inch fractions
Ooof, got to the website, BOM is ~$400 and can lift ~1LB basically. Needs an upgrade path, even if I can salvage most of the parts from a CNC Router project.
Looks pretty jittery
Is that due to the software or hardware? While it looks very nice the lack of smoothness definitely kills it.
I’d say it’s a lack of microstepping, but it looks like the steppers are appropriately speed reduced via belts, so that’s probably not the issue. I feel like it’s got to be the motion planning. It looks like it supports mature software stacks, though, so maybe this was an early get-it-working Arduino-coded version?
Unfortunately as this is the only video without stating any caveats, it’s not a particularly good way to introduce it?
For an opensource version through a similar project
https://www.bcn3d.com/bcn3d-moveo-the-future-of-learning-robotic-arm/
That is a beautiful robot arm, I wonder if they used closed loop or open loop steppers?