Some inventions are so simple that it’s hard to improve them. The magnetic compass is a great example — a magnetized needle, a bit of cork, and a bowl of water are all you need to start navigating the globe. So why in the world would you want to over-complicate things with something like this Earth inductor compass? Just because it’s cool, of course.
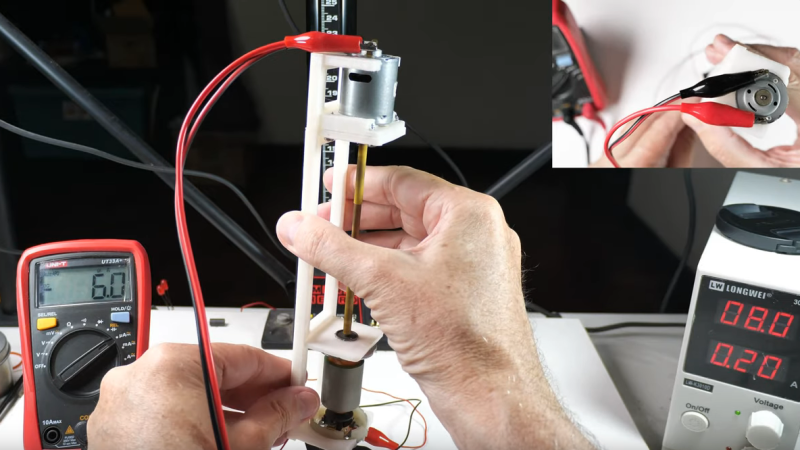
Now, the thing with complication is that it’s often instructive. The simplicity of the magnetic compass masks the theory behind its operation to some degree and completely fails to deliver any quantitative data on the Earth’s magnetic field. [tsbrownie]’s gadget is built from a pair of electric motors, one intact and one stripped of its permanent magnet stators. The two are mounted on a 3D printed frame and coupled by a long shaft made of brass, to magnetically isolate them as much as possible. The motor is powered by a DC supply while a digital ammeter is attached to the terminals on the stator.
When the motor spins, the stator at the other end of the shaft cuts the Earth’s magnetic lines of force and generates a current, which is displayed on the ammeter. How much current is generated depends on how the assembly is oriented. In the video below, [tsbrownie] shows that the current nulls out when oriented along the east-west axis, and reaches a maximum along north-south. It’s not much current — about 35 microamps — but it’s enough to get a solid reading.
Is this a practical substitute for a magnetic compass? Perhaps not for most use cases, but a wind-powered version of this guided [Charles Lindbergh]’s Spirit of St. Louis across the Atlantic in 1927 with an error of only about 10 miles over the trip, so there’s that. Other aircraft compasses take different approaches to the problem of nulling out the magnetic field of the plane.














“take different approaches to the problem of nulling out the magnetic field of the plane”
While electronic measurement of the magnetic field can make nulling easier, I think the real point of Earth inductor compass is that it is not affected by acceleration.
Would it be affected by velocity though? As you are moving through the field lines, that in itself might induce a current. Although perhaps the null will still be in the same place.
A floating compass will tilt forwards as you speed up and tilt backwards as you slow down.
Cool!
How to be sure that the very small measured current is really generated by earth magnetic field, and not by some device producing magnetic field nearby (SMPS in device like the desktop power supply or lighting for example)? Reproducing the experience outside, far to any device, power line… and without any device powered by main (only by battery) to avoid any parasitic source of magnetic field would be interesting to confirm the experience.
He obviously already knew the position of his house/room as you can glean from his voiceover.
So if the device is the same he knows it’s not affected by other things.
But you are right that you should make sure you are in the clear from unwanted external influence when you try this yourself.
Same is true for a classical compass (and a phone compass) though, a large metal object nearby can throw it off, and so can (electro-)magnetic fields.
The position of the rotating axis does not make sense to me… the magnetic field intersecting a rotating rotot in tis direction should produce the same current in any direction because it is spinning.
to me it would make more sens that the rotor axil would indicate the nort-south axis….
am I wrong?
tnx
i’m often surprised by electromagnetic effects so don’t take this as canon but i think it is pretty well-explained by just the right hand rule
https://en.wikipedia.org/wiki/Right-hand_rule#Electromagnetism
the rotating electrons are oriented like your curling fingers and the magnetic field line (north to south) is aligned with your thumb.
i’m not 100% on this but i think it’s productive to think of the electrons as rotating around the axis of the motor, even though the actual windings follow the byzantine path around the rotor… i’m not as confident about this part :)
i want to correct myself: the electrons are revolving not rotating :)
That is what I was thinking too at first. But the mechanical commutator is the reason why it is working. If you would use a Brushles DC-Motor, it would not work. Except you add a encoder to get the phase of the currents produced.
The orientation of brushes in the the compass part are what make the difference. If the magnetic field is going through the rotor in the wrong direction relative to the brushes you generate no current. Like if you were to install magnets in a generator 90 degrees out of phase.
Interesting…
Early in my reading the article, I thinking this was built to measure the vertical angle of the magnetic field. Of which it probably does well.
I was so disappointed after getting a Timex watch (20+ y.a.) with a flux-gate compass, that after intentionally finding the local deviation within a tenth of a degree, and going through the calibration process*, that flux-gate accuracy was only 11%!
*IIRC, the calibration process involved going outside away from any metallic structures, facing North, setting the watch into calibration mode, rotating the watch and I several times, facing North again, before locking down the setting.
Related; I think even the latest casio/g-shock/pro-trek compasses only read out in whole number degrees, even though they’re a newer sensor of some kind. But to be fair, I’m not sure what you’d use to transfer off the reading to make use of it if it was more precise than that. I hope they’re more accurate by though, if you get away from all distortions in the field.
declination is problem too
https://pl.wikipedia.org/wiki/Deklinacja_magnetyczna
The same technique was used to measure the field inside the huge TRIUMF cyclotron ( https://www.triumf.ca ). A long rod could be inserted between the poles to run radially from the perimeter of the cyclotron to the middle, and multiple coils are on it at different radii in the cyclotron. Spinning (or just flipping/rotating 180 degrees) the rod produces a voltage in each coil proportional to the magnetic field at that location or radius in the cyclotron. Repeat for each of the magnet poles, to figure out where to add/subtract magnet material. A neat trick.
I saw the video before this post. He starts with the problem that occurs when near the magnetic north pole and a balanced needle just points to the backing. But then this video goes into this wonderful effect and finishes without a demonstration up in northern Canada to show in 3D that this rotating sensor can be tilted as well rotated. Demo video with soldered leads and a more dexterous showing would help.
This effect makes one to think how big a rotor has to be and more windings (110V vs. 12V) to get a passive indicator panel meter or even a LED (null would be poor) for peak bearing. Oh, and the thing is spun with gear or belt drive by hand or something. Minimalist survival mode. Science fair project for sure.
I don’t see how this compass will be any less vulnerable to stray local magnetic fields (as found inside a ship or aircraft or robot) than a normal one. It still plots where the local magnetic field (a combination of earth’s field plus local stray fields) is pointed. To compensate for stray local fields you need to have 3 axis magnetometry measurement, you need to calibrate by swinging the “frame” (your whole robot, ship, aircraft…) round in all directions, then you plot the sphere of x-y-z points, then work out how off-centre it is and use those offsets to convert your measurements in use in to a direction of the earth’s field. The whole calibration would need redoing any time there is a substantial change in the arrangment of magnetised or magnetically “conductive” parts within your frame (say you redesigned your robot so there was now a motor nearer to where your magnetometer is mounted).