Industrial robot arms are curious devices, found everywhere from the back of old engineering classrooms where they taught kinematics in the 90s, to the factory floor where they do the same thing over and over again while contemplating their existence. For his Hackaday Prize entry, [Dan] is building a big robot arm. It’s not big enough to ride on, but it is large enough to automate a few processes in a reasonably well-equipped lab.
This is not a tiny robotic arm powered by 9 gram hobby servos. For the bicep and tricep of [Dan]’s arm, he’s using linear actuators – they’re high precision and powerful. A few months ago, [Dan] tried to design a hypocycloid gear but couldn’t get a $3000 prototype to work. Although the hypocycloid is out, he did manage to build a strange differential pan/roll mechanism for the wrist of the arm. It really is a thing of beauty, and with the engineering [Dan] has put into it, it’s a very useful tool.
If you’d like to meet [Dan]’s robot arm in person, he’ll be at the 2015 NYC Maker Faire this weekend. Check out [Dan]’s Hackaday Prize video for his robot arm below.
Join us for a Meetup Thursday the 24th of September in Zürich, Switzerland. We’re co-hosting a meetup with FabLab Zürich and we are excited to see you!
Doors open at 18:00 on Thursday, 24 September. We’ll have some food and drink, project show and tell, and time to hang out and get to know each other. This is a free event but please RSVP to let us know you’re coming.
Bring the project you are working on to show off, everyone loves to see projects regardless of what stage they’re in. Many times, showing your project and talking about it pushes your project forward; “oh hey, I have an extra RN42 BT module you can have” or “I already wrote a driver for that chip and it’s on github”. Showing your project to others can also inspire someone else to make their own project based on your awesome idea. I’ve been motivated many times to start a project because of what I saw someone else make.
Germany Too!
This Zurich meetup isn’t the only chance to connect with Hackaday in Europe. Next week, we’ll be in Berlin! We’re co-hosting a Berlin Meetup with Vintage Computer Festival organizers in the evening after Berlin Maker Faire and the Vintage Computing Festival. VCF have planned food and drink, a live band or two… chip tunes! It will be on October 3rd, and [Elliot], [Sophi] and [Bilke] will all be there.
GPS-based location services will be around with us forever. If you’re in the outback, in the middle of the ocean, or even just in a neighborhood that doesn’t have good cell coverage, there’s no better way to figure out where you are than GPS. Using satellites orbiting thousands of miles above the Earth as a location service is an idea that breaks down at some very inopportune times. If you’re in a parking garage, you’re not using GPS to find your car. If you’re in a shopping mall, the best way to find your way to a store is still a map. Anyone every tried to use GPS and Google Maps in the hotel/casino labyrinth that is the Las Vegas strip?
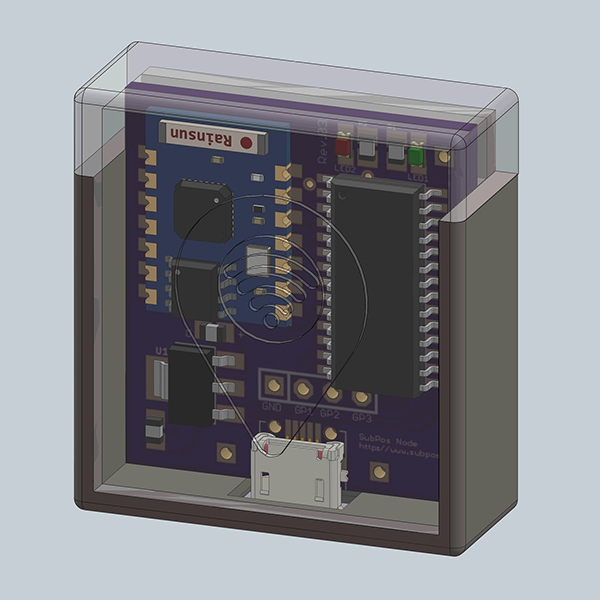
[Blecky]’s entry for the Best Product competition of the Hackaday Prize aims to solve this problem. It’s an indoor location service using only cheap WiFi modules called SubPos. With just a few ESP8266 modules, [Blecky] can set up a WiFi positioning system, accurate to half a meter, that can be used wherever GPS isn’t.
The idea for a GPS-less positioning system came to [Blecky] after a caving expedition and finding navigation though subterranean structures was difficult without the aid of cell coverage and GPS. This got [Blecky] thinking what would be required to build a positioning service in a subterranian environment.
A SubPos node, equipped with an ESP8266 WiFi module
The answer to this question came in the form of a cheap WiFi module. Each of the SubPos nodes are encoded with the GPS coordinates of where they’re placed. By transmitting this location through the WiFi Beacon Frame, along with the transmitted power, any cell phone can use three or more nodes to determine its true location, down to a few centimeters. All of this is done without connecting to a specific WiFi network; it’s a complete hack of the WiFi standard to allow positioning data.
The most shallow comparison to an existing geolocation system would be a WiFi positioning system (WPS), but there are several key differences. In WPS, the WiFi APs don’t transmit their own location; the AP is simply cross-referenced with GPS coordinates in a database. Secondly, APs do not transmit their own transmit power – important if you’re using RSSI to determine how far you are from an Access Point.
The best comparison to an indoor location service comes from a new Decawave module that sets up ‘base stations’ and figures out a sensor’s location based on time of flight. This, however, requires additional radios for each device receiving location data. SubPos only requires WiFi, and you don’t even need to connect to an AP to get this location data; everything is broadcast as a beacon frame, and every device with WiFi detects a SubPos node automatically.
As an entry to the Hackaday Prize Best Product competition, there is an inevitable consideration as to how this product will be marketed. The applications for businesses are obvious; shopping malls could easily build a smartphone app showing a user exactly where in the mall they are, and provide directions to The Gap or one of the dozens of GameStops in the building. Because the SubPos nodes also work in 3D space, parking garage owners could set up a dozen or so SubPos nodes to direct you to your exact parking spot. Disney, I’m sure, would pay through the nose to get this technology in their parks.
Already [Blecky] is in talks with one company that would like to license his technology, but he’s not focused only on the high-dollar business accounts. He already has a product that needs manufacturing, and if he wins the Best Product competition, he will be working on something for the hacker/homebrew market. The price point [Blecky] sees is around $15 a node. The economics of this work with the ESP WiFi module, but [Blecky] is also looking at alternative chip sets that would allow for more than just RSSI position finding; an improved version of the SubPos node not based on the ESP-8266 could bring time of flight into the mix, providing better position accuracy while still being cheaper to manufacture than the current ESP-based solution.
[Blecky] has a great project on his hands here, and something we will, undoubtedly, see more of in the future. The idea of using WiFi beacon frames to transmit location data, and received signal strength to suss out a position is groundbreaking and applicable to everything from spelunking to finding your car in a parking garage. Since the SubPos system isn’t tied to any specific hardware, this could even be implemented in commercial routers, giving any device with WiFi true location data, inside or out. It’s also one of the top ten finalists for the Hackaday Prize Best Product competition, and like the others, it’s the cream of the crop.
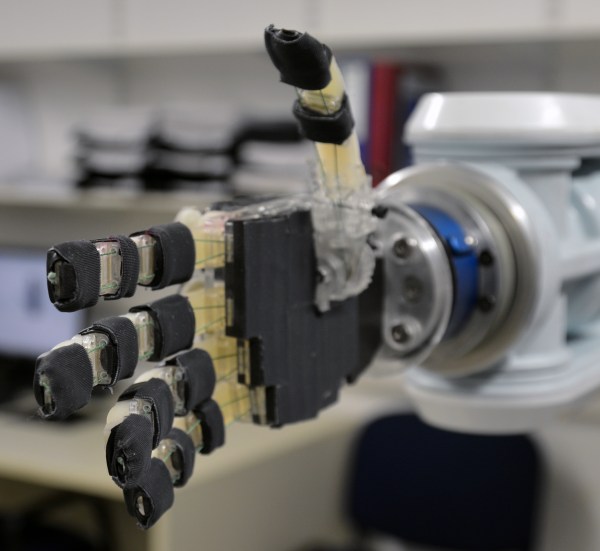
The human hand is an amazing machine, and duplicating even a fraction of its abilities in a prosthetic is a daunting task. Flexible anthropomorphic prosthetics can reach tens of thousands of dollars and are beyond the means of many of the people who need them. So imagine the impact a $200USD prosthetic hand could have.
For such a low, low price you might expect a simple hook or pincer grip hand, but the OpenBionics initiative designed their hand from the outset to mimic the human hand as much as possible. The fingers are Plexiglas with silicone knuckles that are flexed by tendon cables running in sheaths and extended by energy stored in elastomeric material running along their dorsal aspects. Each finger can be selectively locked in place using a differential based on the whiffletree mechanism, resulting in 16 combinations of finger positions with only a single motor. Combined with 9 unique thumb positions, 144 unique grasp are possible with the open source hand built from hardware store and 3D printed parts. Stay tuned for a video of the hand in action after the break.
3D printing is beginning to prove it’s the next big thing in prosthetics. Hackers are coming up with all kinds of static artificial hands, from the elegant to super-hero themed. Maybe the mechanism that OpenBionics has come up with will find its way into these hands – after all, it is an open source project.
A while ago, [Joshua Young] had a conversation with an environmental scientist. There aren’t many government-funded pollution monitoring stations around Texas, but there are a lot of well-off home owners associations in Houston that have the sensors to collect the data. Air quality monitoring is important, and more data is usually better, and without these HOA’s providing the data for free, these environmental scientists wouldn’t have the data to do their job.
The system [Joshua] is building uses a suite of air quality sensors to measure sulfur dioxide, carbon monoxide, nitrogen oxides, ozone and particulate matter. These sensors connect to the Internet through either an ESP8266 WiFi module or a LoRa radio module, push the data onto the cloud, and let the entire world know what the air quality is.
Using tens of thousands of individual base stations to gather data has been done before; Weather Underground uses ten times as many weather stations than the National Weather Service to get better weather tracking resolution. Pollution sensors aren’t normally a part of a weather station, and with [Joshua]’s project, the environmental scientists tracking this data will hopefully get the data they need.
The Health Mate, as the guys are calling it, is a small bracelet loaded up with IR LEDs, photodiodes, a temperature sensor, and a WiFi module. They’ve wired all these parts up on a home made board, connected a battery, and are starting to measure their vitals.
It’s a simple device, but it’s simple for a reason: heart rate and blood oxygen saturation are some of the most important indicators doctors and nurses look at when triaging patients. By making their health monitor cheap and good enough, it eventually makes its way onto the wrists of more patients, and will hopefully save more lives
The usual way robotics is taught – and nearly everything, for that matter – is simple. A teacher gets a pre-built module or kit, teaches the students how to use the kit, and class is adjourned. There are significant and obvious drawbacks to this. [Kevin Harrington]’s entry for the Hackaday Prize turns that pedagogy on its head. It’s a robotics development platform that encourages everyone to create their own robots from scratch, starting with the question, ‘how many legs do you want your robot to have’.
Bowler Studio uses OpenCV for image processing, a kinematics engine, a JCSG-based CAD and 3D modeling engine to interface with motors, create 3D models according to kinematic models, feed imaging data to a robot, and create graphical interfaces for robots. It’s an entire robotics creation studio in a single package, and of course everything can be backed up to the cloud.
The electronic backbone is another one of [Kevin] and Neuron Robotics’ projects, DyIO, a USB peripheral that makes for a great robotics platform. The DyIO can control up to 24 servos, enough for a very, very complex robot, and also has the ability to control motors, read encoders, or just blink pins.
These two projects together make for a great way to learn the ins and outs of robots that are a little more complex than a simple wheeled robot, and expandable enough to make some really, really cool projects