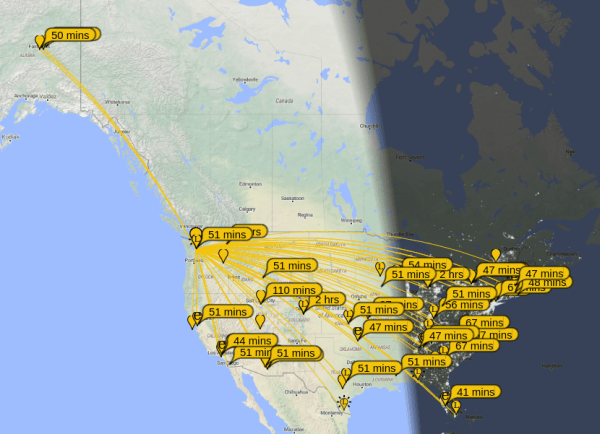
While most of us carry cell phones that have GPS and other location services, they require a significant amount of infrastructure to be useful. Drive from Washington to Alaska like [Lonney] did a while back, where that infrastructure is essentially nonexistent, and you’ll need to come up with some other solutions to let friends and family know where you are.
A tool called the Automatic Packet Reporting System (APRS) is fairly robust in the very high frequency (VHF) part of the amateur radio spectrum, but this solution still relies on a not-insignificant amount of infrastructure for the limited distances involved with VHF. [Lonney] adapted a few other tools to get APRS up and running in the HF range, letting his friends keep tabs on him even from the most remote locations.
Guitar Hero was a cultural phenomenon a little over a decade ago, and showed that there was a real fun time to be had playing a virtual instrument on a controller. There are several other similar games available now for different instruments, including one called Trombone Champ that [Hung Truong] is a fan of which replaces the traditional guitar with a trombone. The sliding action of a trombone is significantly different than the frets of a guitar, making it a unique challenge in a video game. But an extra challenge is building a controller for the game that works by playing a real trombone.
Unlike a guitar which can easily map finger positions to buttons, mapping a more analog instrument like a trombone with its continuous slide to a digital space is a little harder. The approach here was to use an ESP32 and program it to send mouse inputs to a computer. First, an air pressure sensor was added to the bell of the trombone, so that when air is passing through it a mouse click is registered, which tells the computer that a note is currently being played. Second, a mouse position is generated by the position of the slide by using a time-of-flight sensor, also mounted to the bell. The ESP32 sends these mouse signals to the computer which are then used as inputs for the game.
While [Hung Truong] found that his sensors were not of the highest quality, he did find the latency of the control interface, and the control interface itself, to be relatively successful. With some tuning of the sensors he figures that this could be a much more effective device than the current prototype. If you’re wondering if the guitar hero equivalent exists or not, take a look at this classic hack from ’09.
Age, we’re told, is just a number, but that number seems to be the ever-increasing count of injuries of a ridiculous nature. Where once the younger version of us could jump from a moving car or fall out of a tree with just a few scrapes to show for the effort, add a few dozen trips around the sun and you find that just “sleeping funny” can put you out of service for a week.
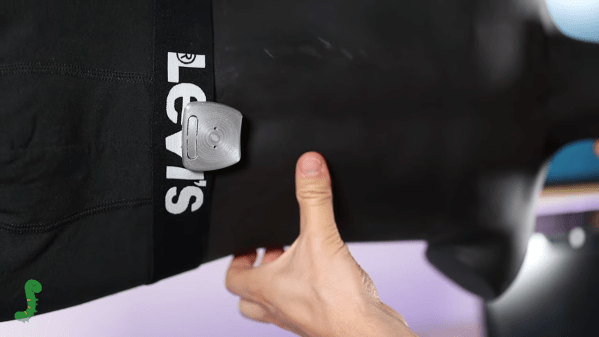
Keen to avoid such woes, [Elite Worm] came up with this sleep posture alarm to watch for nocturnal transgressions, having noticed that switching to a face-down sleeping position puts a kink in his neck. He first considered using simple mechanical tilt switches to detect unconscious excursions from supine to prone. But rather than be locked into a single posture, he decided to go with an accelerometer instead. The IMU and an ATtiny85 live on a custom PCB along with a small vibrating motor, which allows for more discrete alerts than a buzzer or beeper would.
Placed in a 3D printed enclosure and clipped to his shorts, the wearable is ready to go. The microcontroller wakes up every eight seconds to check his position, sounding the alarm if he’s drifting into painful territory. [Elite] did some power analysis on the device, and while there’s room for improvement, the current estimated 18 days between charging isn’t too shabby. The video below has all the details; hopefully, design files and code will show up on his GitHub soon.
Considering that most of us spend a third of our life sleeping, it’s little wonder hackers have attacked sleep problems with gusto. From watching your brainwaves to AI-generated nonsense ASMR, there’s plenty of hacking fodder once your head hits the pillow.
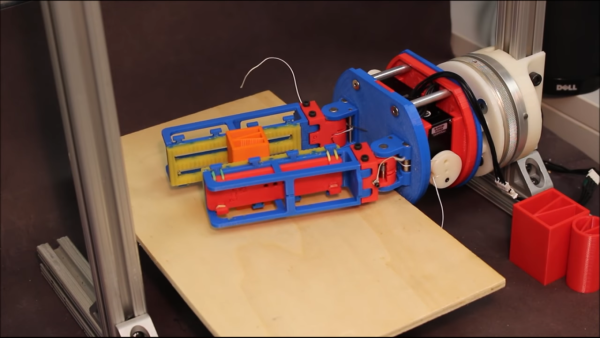
Unless you are in the fields of robotics or prosthetics, you likely take for granted the fine motor skills our hands have. Picking up and using a pen is no small feat for a robot which doesn’t have a dedicated pen-grabbing apparatus. Holding a mobile phone with the same gripper is equally daunting, not to mention moving that phone around once it has been grasped. Part of the wonder of our hands is the shape and texture which allows pens and phones to slide around at one moment, and hold fast the next moment. Yale’s Grab Lab has built a gripper which starts to solve that problem by changing the friction of the manipulators.
A spring-loaded set of slats with a low-friction surface allow a held object to move freely, but when more pressure is exerted by the robot, the slats retract and a high-friction surface contacts the object. This is similar to our fingers with their round surfaces. When we brush our hands over something lightly, they graze the surface but when we hold tight, our soft flesh meets the surface of the object and we can hold tightly. The Grab Lab is doing a great job demonstrating the solution and taking steps to more capable robots. All hail Skynet.
Some people are better than others when it comes to documenting their hacks. Some people, like [Micah Elizabeth Scott], aka [scanlime], set the gold standard with their recordings. Hacking sessions with the Winch Bot have been streamed regularly throughout the build and this is going to lead to a stacking effect in her next projects because the Winch Bot was designed to record hacking sessions. Hacking video inception anyone? Her Winch Bot summary video is after the break.
The first part of this build, which she calls the Tuco Flyer, was [Micah Elizabeth Scott]’s camera gimbal hack which we already covered and is a wonderful learning experience in itself. She refers to the gimbal portion as the “flyer” since it can move around. The Winch Bot contains the stationary parts of the Tuco Flyer and control where the camera will be in the room.
Use of the global positioning system is all around us. From the satnav in your car to quadcopters hovering above a point, there are hundreds of ways we use the Global Positioning System every day. There are a few drawbacks to GPS: it takes a while to acquire a signal, GPS doesn’t work well indoors, and because nodes on the Internet of Things will be cheap, they probably won’t have a GPS receiver.
These facts open up the door for a new kind of positioning system. A local positioning system that uses hardware devices already have, but is still able to determine a location within a few feet. For his Hackaday Prize entry, [Blecky] is building the SubPos Ranger, a local positioning system based on 802.15.4 radios that still allows a device to determine its own location.
The SubPos Ranger is based on [Blecky]’s entry for the 2015 Hackaday Prize, SubPos that used WiFi, RSSI, and trilateration to determine a receiver’s position in reference to three or more base stations. It works remarkably well, even in places where GPS doesn’t, like parking garages and basements.
The SubPos Ranger is an extension of the WiFi-only SubPos, based on 802.15.4, and offers longer range and lower power than the WiFi-only SubPos system. It’s still capable of determining where a receiver is to within a few feet, making this the ideal solution for devices that need to know where are without relying on GPS.
GPS-based location services will be around with us forever. If you’re in the outback, in the middle of the ocean, or even just in a neighborhood that doesn’t have good cell coverage, there’s no better way to figure out where you are than GPS. Using satellites orbiting thousands of miles above the Earth as a location service is an idea that breaks down at some very inopportune times. If you’re in a parking garage, you’re not using GPS to find your car. If you’re in a shopping mall, the best way to find your way to a store is still a map. Anyone every tried to use GPS and Google Maps in the hotel/casino labyrinth that is the Las Vegas strip?
[Blecky]’s entry for the Best Product competition of the Hackaday Prize aims to solve this problem. It’s an indoor location service using only cheap WiFi modules called SubPos. With just a few ESP8266 modules, [Blecky] can set up a WiFi positioning system, accurate to half a meter, that can be used wherever GPS isn’t.
The idea for a GPS-less positioning system came to [Blecky] after a caving expedition and finding navigation though subterranean structures was difficult without the aid of cell coverage and GPS. This got [Blecky] thinking what would be required to build a positioning service in a subterranian environment.
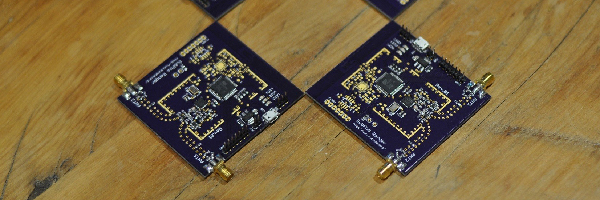
A SubPos node, equipped with an ESP8266 WiFi module
The answer to this question came in the form of a cheap WiFi module. Each of the SubPos nodes are encoded with the GPS coordinates of where they’re placed. By transmitting this location through the WiFi Beacon Frame, along with the transmitted power, any cell phone can use three or more nodes to determine its true location, down to a few centimeters. All of this is done without connecting to a specific WiFi network; it’s a complete hack of the WiFi standard to allow positioning data.
The most shallow comparison to an existing geolocation system would be a WiFi positioning system (WPS), but there are several key differences. In WPS, the WiFi APs don’t transmit their own location; the AP is simply cross-referenced with GPS coordinates in a database. Secondly, APs do not transmit their own transmit power – important if you’re using RSSI to determine how far you are from an Access Point.
The best comparison to an indoor location service comes from a new Decawave module that sets up ‘base stations’ and figures out a sensor’s location based on time of flight. This, however, requires additional radios for each device receiving location data. SubPos only requires WiFi, and you don’t even need to connect to an AP to get this location data; everything is broadcast as a beacon frame, and every device with WiFi detects a SubPos node automatically.
As an entry to the Hackaday Prize Best Product competition, there is an inevitable consideration as to how this product will be marketed. The applications for businesses are obvious; shopping malls could easily build a smartphone app showing a user exactly where in the mall they are, and provide directions to The Gap or one of the dozens of GameStops in the building. Because the SubPos nodes also work in 3D space, parking garage owners could set up a dozen or so SubPos nodes to direct you to your exact parking spot. Disney, I’m sure, would pay through the nose to get this technology in their parks.
Already [Blecky] is in talks with one company that would like to license his technology, but he’s not focused only on the high-dollar business accounts. He already has a product that needs manufacturing, and if he wins the Best Product competition, he will be working on something for the hacker/homebrew market. The price point [Blecky] sees is around $15 a node. The economics of this work with the ESP WiFi module, but [Blecky] is also looking at alternative chip sets that would allow for more than just RSSI position finding; an improved version of the SubPos node not based on the ESP-8266 could bring time of flight into the mix, providing better position accuracy while still being cheaper to manufacture than the current ESP-based solution.
[Blecky] has a great project on his hands here, and something we will, undoubtedly, see more of in the future. The idea of using WiFi beacon frames to transmit location data, and received signal strength to suss out a position is groundbreaking and applicable to everything from spelunking to finding your car in a parking garage. Since the SubPos system isn’t tied to any specific hardware, this could even be implemented in commercial routers, giving any device with WiFi true location data, inside or out. It’s also one of the top ten finalists for the Hackaday Prize Best Product competition, and like the others, it’s the cream of the crop.