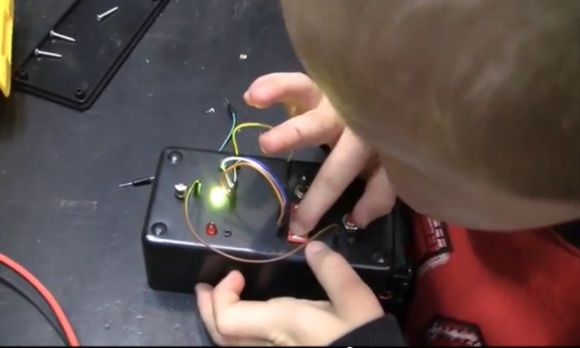
Here’s a great idea: an Educational Circuit Box you can make to get kids interested in electronics! What looks like a boring project box with wires sticking out might just become a box of wonder and curiosity for young ones.
[Fileark] built this for his son, and has happily shared it on his blog for others to recreate. As you can probably guess from the picture, it makes use of a project box, LEDs, buttons, switches, and female header pins. Using the included breadboard jumpers picked up off of eBay, it allows your kid to learn about circuits by plugging in different components and seeing what happens.
The majority of the parts he used were salvaged from scrap electronics he had laying about. It’s a great way to turn e-waste into something fun and educational for kids! For more information about the project, stick around after the break to see [Fileark] explain (and his son demonstrate!) it in a video.
Continue reading “Educational Circuit Box For Young Aspiring Hackers”
 If [Will Baden] is in the running for Father of the Year, he’s a shoe-in. His son requested a robot-themed birthday party, so [Will] did what any superhero father would do and
If [Will Baden] is in the running for Father of the Year, he’s a shoe-in. His son requested a robot-themed birthday party, so [Will] did what any superhero father would do and