Have you ever heard of the game Johann Sebastian Joust? We haven’t either, but [Juerd] has come up with an open source version of it called Opentilt, and we have to admit — it looks like a lot of fun!
Johann Sebastian Joust uses motion controllers for a game that can be played indoors or out, without a screen. Everyone gets a motion controller, and the object of the game is to make everyone else move their controller too fast. It even has a music mode that lets you move your controller relative to the speed of the music! Anyway, it had an extremely successful kickstarter, and it has been debuted at many events around the world — but it’s simply not available to the general public just yet. [Juerd] couldn’t wait that long so he decided to make a similar open source version of it, with cheap off-the-shelf parts. The biggest difference is this one doesn’t have the music.
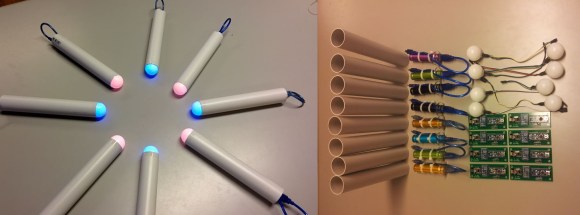
The build is quite simple and inexpensive. You’re looking at some PVC pipe, an Arduino Nano, a RGB LED, a 2.4GHz radio module, an accelerometer, a pingpong ball, a battery pack, and various other resistors and wire. Nothing to it really! All the source code, and instructions are available off of [Juerd’s] site, and he’s done a great job explaining everything, down to fixing a common problem that some people have on Arduino Nanos!
Stick around after the break to see how the original Johann Sebastian Joust game works!