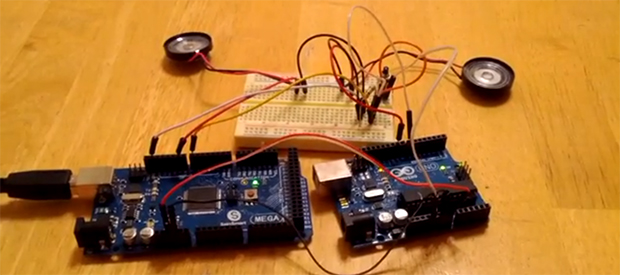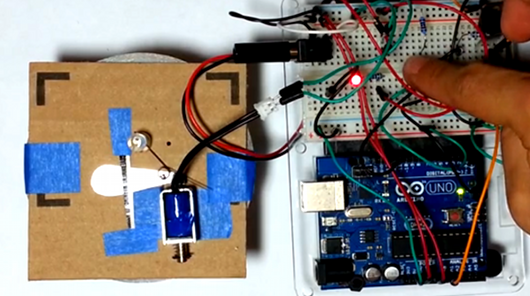
[Kevin] has made an interesting camera shutter mechanism using an Arduino and a solenoid. To keep it extremely simple, he is only controlling a single leaf. In the linked video, you can see him take it through its paces from 1/125 seconds up to infinite. This is, of course, a proof of concept, and [Kevin] mentions using smaller components to make everything fit easily inside a Holga-like body. As he points out in the video’s comments, digitally controlling the flash would be a simple matter as well.
A basic camera is incredibly simple to make, and [Kevin’s] design certainly isn’t complicated. That said, if you look at the big picture, [Kevin] is demonstrating how feasible it could be to build an entirely custom camera with a standard microcontroller as the brain. We can’t help but think of all of the possibilities when you are able to control the entire photo taking process.
Interestingly, [Kevin] is also behind this twin lens reflex Kickstarter project from earlier in the year. It will be interesting to see what other camera-related hacks we will see from him.