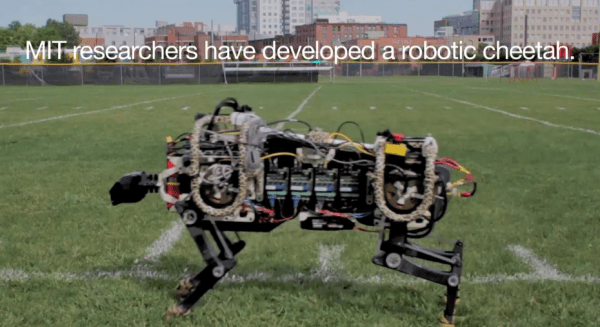
Researchers over at MIT are hard at work upgrading their Robotic Cheetah. They are developing an algorithm for bounding movement, after researching how real cheetahs run in the wild.
Mach 2 is fully electric and battery-powered, can currently run at speeds of 10MPH (however they’re predicting it will be able to reach 30MPH in the future), and can even jump over obstacles 33cm tall.
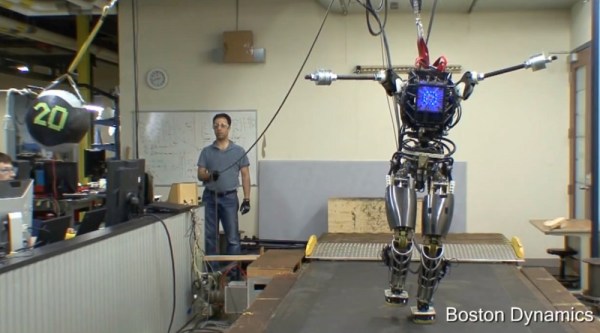
We originally saw the first robotic Cheetah from Boston Dynamics in cooperation with DARPA two years ago — it could run faster than any human alive (28.3MPH) but in its tests it was tethered to its hydraulic power pack and running on a treadmill. It’s unclear if MIT’s Cheetah is a direct descendant from that one, but they are both supported by DARPA.
The technology in this project is nothing short of amazing — its electric motors are actually a custom part designed by one of the professors of Electrical Engineering at MIT, [Jeffrey Lang]. In order for the robot to run smoothly, its bounding algorithm is sending commands to each leg to exert a very precise amount of force during each footstep, just to ensure it maintains the set speed.
Continue reading “MIT’s Robotic Cheetah Is Getting Even Scarier”