Sending teams of tiny drones to explore areas and structures is a staple in sci-fi and research, but the weight and size of sensors and the required processing power have long been a limiting factor. In the video below, a research team from [ETH Zurich] breaks through these limits, demonstrating indoor mapping with a swarm of tiny drones without dependence on any external systems.
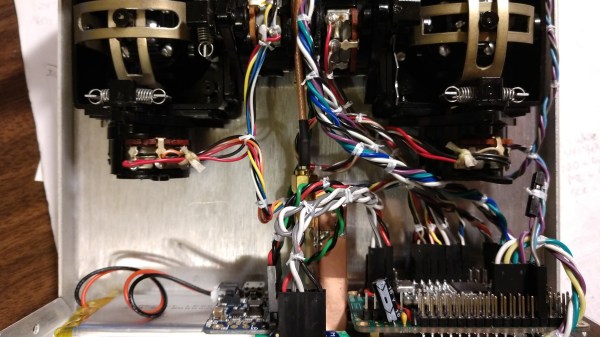
The drone is the modular Crazyflie platform, which uses stackable PCBs (decks) to expand capabilities. The team added a Flow deck for altitude control and motion tracking, and a Loco positioning deck with a UWB module determining relative distances between drones. On top of this, the team added two custom decks. The first mounts four VL53L5CX 8×8 pixel TOF sensors for omnidirectional LIDAR scanning. The final deck does handles all the required processing with a GAP9 System-on-Chip, which features 10 RISC-V cores running on just 200 mW of power.
Of course the special sauce of this project lies in the software. The team developed a lightweight collaborative Simultaneous Localization And Mapping (SLAM) algorithm which can be distributed across all the drones in the swarm. It combines LIDAR scan data and the estimated position of the drone during the scan, and then overlays the data for the scans for each location across different drones, compensating for errors in the odometry data. The team also implemented inter-drone collision avoidance, packet collision avoidance and optimizing drones’ paths. The code is supposed to be available on GitHub, but the link was broken at the time of writing.
The Crazyflie platform has been around for more than a decade now, and we’ve seen it used in several research projects, especially related to autonomous navigation. Continue reading “Tiny Drones Do Distributed Mapping”