Although not the biggest hexapod walker we’ve seen by any means, this one is nonetheless worth a mention. Made with windshield wiper motors, PVC pipe, and lots of wood, it’s still a good size ‘bot. It’s a work in progress, but check out the video of it’s legs being tested as well as one of it’s preliminary assembly after the break.
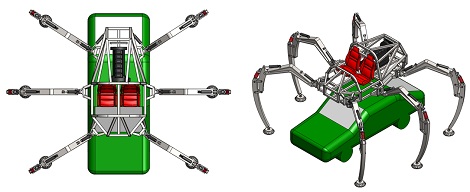
Control is similar to this little hexapod that we’ve featured before in the the front and back legs are driven by a motor and linked together using threaded rod. In this case though, the rod is 1/4 – 20, much larger than the 4-40 rod used by it’s little predecessor. Also unlike little PegLeg, the middle legs are independently actuated, not linked together. This should allow for some different modes of locomotion.
Different modes of locomotion, that is, if it’s able to walk. Although able to pick itself up, the middle legs are barely strong enough to support the large battery and powerful, but heavy, automotive motors. This is an introductory post to this project, and everything will hopefully be worked out and explained in time. Be sure to check back and see how this robot progresses, and the details of the different elements of this ‘bot. Continue reading “A Large Hexapod Made Of Wood And PVC Pipe”