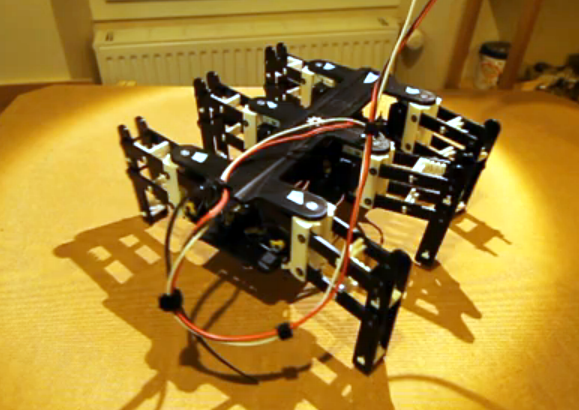
Moving your hand makes this hexapod dance like a stringless marionette. Okay, so there’s obviously one string which is actually a wire but you know what we mean. The device on the floor is a Leap Motion sensor which is monitoring [Queron Williams’] hand gestures. This is done using a Processing library which leverages the Leap Motion API.
Right now the hand signals only affect pitch, roll, and yaw of the hexapod’s body. But [Queron] does plan to add support for monitoring both hands to add more control. We look at the demo after the break and think this is getting pretty close to the manipulations shown by [Tom Cruise] in Minority Report. Add Google Glass for a Heads Up Display and you could have auxiliary controls rendered on the periphery.
While you’re looking at [Queron’s] project post click on his ‘hexapod’ tag to catch a glimpse the build process for the robot.
Continue reading “Leap Motion Controls Hexapod With Hand Signals”