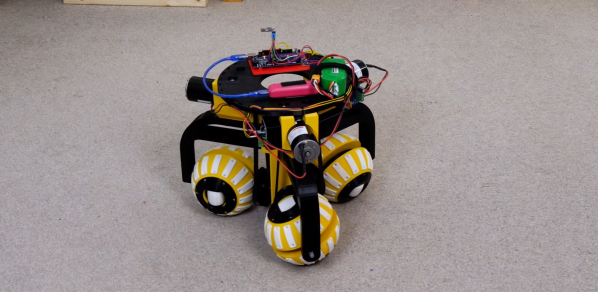
The ability to change direction without turning is the specialty of omnidirectional wheels, which [maker.moekoe] used to their full potential on a pair of ESP32-controlled robots. Video after the break.
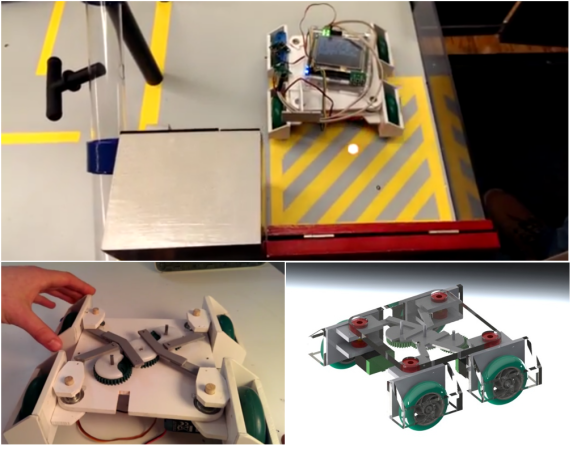
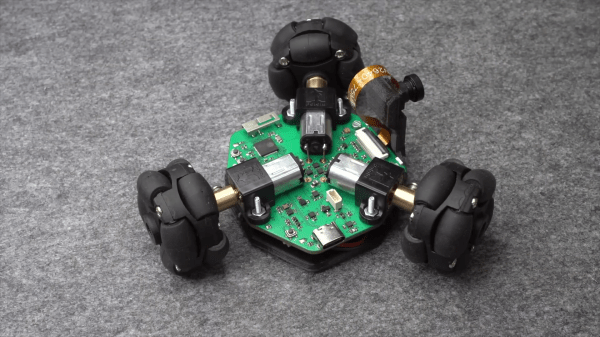
Thanks to the rollers on the wheels, the wheels could be arranged at 120° in relation to each other on the 3-wheeler and 90° 4-wheeler. [maker.moekoe] used ChatGPT and a simple python simulation to find and verify the motor control algorithm required for smooth omnidirectional driving.
A single custom PCB incorporates all the electronics, and doubles as the robot’s chassis, with the geared brushed motors bolted directly to it. An ESP32-S2 runs the show, and can also stream FPV video from the same OV2640 camera used on the popular ESP32-cam modules. The LiPo battery is held by a 3D-printed support plate screws to the bottom of the PCB. The robots can controlled by a simple web-app served by the ESP32, or a using the IMU on custom controller also built around an ESP32-S2 which uses the ESP-NOW wireless protocol.
Even though the robots’ software is still in the early stages, the movement looks extremely smooth and effortless. Plus, their all-in-one PCB chassis makes for an elegant and clean build
Continue reading “Go In All The Directions With Omniwheeled ESP32 Bot”