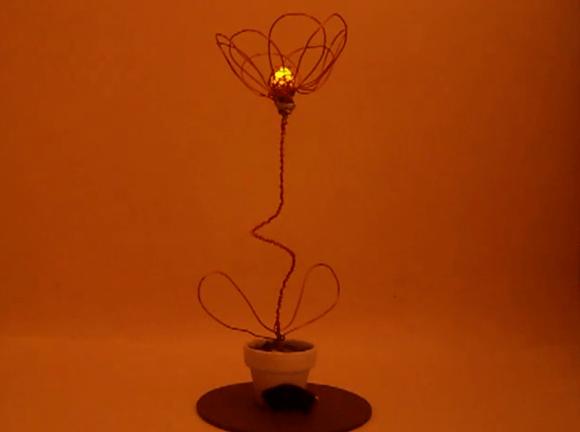
To the casual observer this flower looks nice as its illuminated center fades in and out. But there’s hidden meaning to that light. Some of the blinks are longer than others; this flower is using Morse Code.
[Renaud Schleck] wanted to try a few different things with his MSP430 microcontroller. He decided on an LED that looks like a flower as it will be a nice piece of decor to set around the home. To add the Morse Code message he wanted something a bit more eloquent (and less distracting) than purely digital flashing. So he took the dots and dashes of the hard-coded message and turned them into fading signals by using Pulse-Width Modulation.
He free-formed the circuit so that it, and the coin cell that powers it, would fit in the flower pot. A reed switch is responsible for turning the juice on and off. When placed near a magnet the flower begins its gentle playback.
Continue reading “Morse Code Flower Is Trying To Tell You Something”
 [Ronen K.] wrote in to tell us about
[Ronen K.] wrote in to tell us about 













