The Klackerlaken is a combination of LED throwie and bristlebot. The bauble is easy to build and really has no other purpose than to delight the masses. The diminutive devices were first seen in the wild at the 2011 CCC (Chaos Communications Camp) as a hands-on workshop. Check out the clip after the break and you’ll see why this really sucks in the spectators.
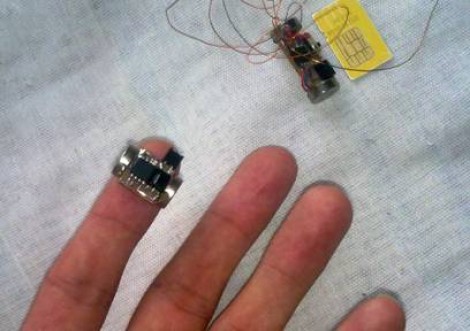
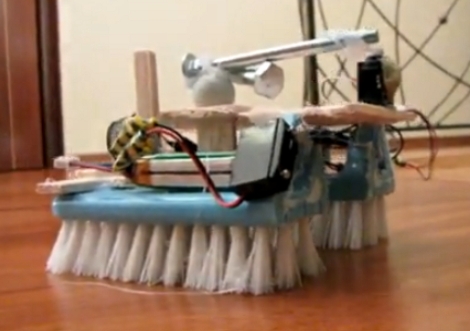
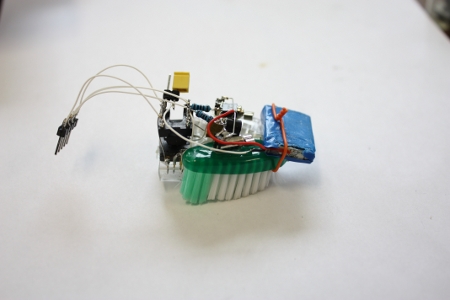
We’ve seen a ton of Bristlebots before (this tiny steerable version is one of our favorites) and were intrigued to see bottle caps used as the feet instead of the traditional toothbrush head. In fact, that video clip shows off several different iterations including two caps acting as an enclosure for the button cell and vibrating motor. Googly eyes on the top really complete the look on that one.
Decorating the robots with LEDs, fake eyes, tails, and feathers helps to temper the technical aspects that kids are learning as they put together one of their own. We’re glad that [Martin] shared the link at the top which covers the creations seen at a workshop held by Dorkbot Berlin. This would be a great activity for your Hackerspace’s next open house! Perhaps its possible to have follow-up classes that improve on the design, using rechargeable cells instead of disposable buttons, or maybe supercaps would work.
Continue reading “Klackerlaken Gets The Common Man Excited About Electronics”