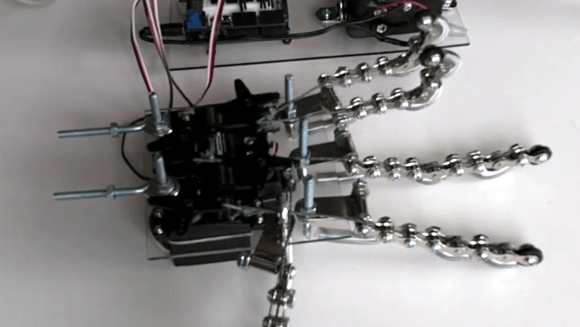
Here’s a robot hand which can be built using mostly hardware store items. It doesn’t have the strongest of grips, but it does have lifelike movement. The demonstration video shows it picking up small objects like a metal nut.
The image above shows the ring and pinky fingers of the hand beginning to flex. These are controlled by the servo motors mounted in the palm area. The skeletal structure of each digit begins with the links of a bicycle chain. The links are first separated by removing the friction fit rods. Each rod is replaced with a screw and a nut, which also allows the springs (which open the digits) to be anchored at each ‘knuckle’.
[Aaron Thomen] didn’t stop the design process once the hand was finished. He went on to build a controller which lets you pull some rings with your fingers to affect movement. This movement is measured by a set of potentiometers and translated into electrical signals to position the hand’s servo motors. The demo, as well as two how-to videos are embedded below.
Demo:
How-to Part 1:
How-to Part 2:














So I just watched this, and now I’m about to sleep. I have a feeling there will be crazy robot hands in my dreams tonight …
if that scares you, i made this in 2007… http://www.roboteernat.co.uk/?page_id=63
And there will be NO escape! I think he could make it more dexterous by putting pads on his links inside the fingers so it could hold things like people do. Hmm. My sentence doesn’t make a lot of sense. Perhaps neither does my idea?
it does make sense, it just requires thought… which most people aren’t willing to do.
awesome. Check out these other robots and hands
http://inmoov.blogspot.co.uk/
http://openbiped.org/ (shameless plug)
I feel underplayed this…. it is in fact more than awesome. awesome is underplaying your achievement. It is totall awesome, very clever and well designed. Well done
This is what the Terminator would have looked like if Skynet hadn’t killed all the accountants on Judgement Day.
Accountants 1st, Lawyers 2nd… for good and obvious reasons :)
I would go the reverse order, but as you like …
I have been looking for something similar to this to tinker with. Awesome video.
Awesome!
Awesome! Very clever to use the links of a bicycle chain. And very nice explanation video!