The “Navigation Thing“ was designed and built by [Jan Mrázek] as part of a night game activity for high school students during week-long seminar. A night-time path through a forest had stations with simple tasks, and the Navigation Thing used GPS, digital compass, a beeper, and a ring of RGB LEDs to provide a bit of “Wow factor” while guiding a group of students from one station to the next. The devices had a clear design direction:
“I wanted to build a device which a participant would find, insert batteries, and follow the beeping to find the next stop. Imagine the strong feeling of straying in the middle of the night in an unknown terrain far away from civilization trusting only a beeping thing you found. That was the feeling I wanted to achieve.”
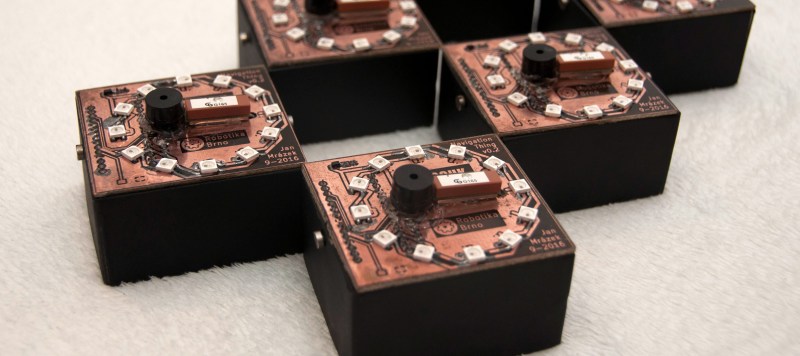
The Navigation Things (there are six in total) guide users to fixed waypoints with GPS, a digital compass, and a ring of WS2812 LEDs — but the primary means of feedback to the user is a beeping that gets faster as you approach the destination. [Jan] had only four days to make all six units, which was doable. But as most of us know, delivering on a tight deadline is often less about doing the work you know about, and more about effectively handling the unexpected obstacles that inevitably pop up in the process.
The first real problem to solve was the beeping itself. “Beep faster as you get closer to the destination” seems like a simple task, but due to the way humans perceive things it’s more complex than it sounds. We perceive large changes easier than small incremental ones, so a straight linear change in beep frequency based on distance doesn’t work very well. Similar problems (and their solutions) exist whether you’re controlling volume, brightness, or just about anything else that humans perceive. Instead of encoding distance as a beep frequency, it’s much more effective to simply use beeps to signal overall changes: beep noticeably slower as you move away, but beep much faster as you get close.

The other interesting problems were less straightforward and were related to the digital compass, or magnetometer. The first problem was that the piezo buzzers [Jan] sourced contained no actual piezo elements. They contained magnets – which interfered with the operation of the digital compass. After solving that, still more compass problems arose. When testing the final units in the field, the compass readings were not as expected and [Jan] had no idea why.
After careful troubleshooting, the culprit was found: the AA cells on the other side of the circuit board. Every AA cell has a faint (and slightly different) magnetic field, and the proximity and placement of the cells with respect to the magnetometer was causing the deviation. Happily, the fix was simple once the problem was understood: calibrate the compass every time new batteries are inserted.
If you’re interested in the Navigation Thing, check out the github repository. And on the topic of actual piezoelectric devices, piezos are implemented in a variety of clever ways. There are even piezo transformers and piezo vacuum pumps.














Why “fake piezos”? Actually, most of 12mm buzzers are electromagnetic, not piezoelectric, despite being called “piezos”. There is nothing fake in it.
Exactly. It’s the sellers not knowing what they sell.
or the buyer not watching for specs or data-sheet, things like impedance or current generally tell you what kind of buzzer your are buying
Depends weather they were marketed as piezo buzzers or just buzzers or sounder.
Just a quick look on eBay lists plenty of “piezo” buzers which are not piezo at all.
Yes checking the data sheet is the correct way to do it but not always the way it is done.
Asking for data sheets on Ebay? Most far east shops couldn’t sort a triode out of a drawer of resistors. If we’re lucky the specs aren’t copy-pasted from somewhere else (a very common practice) or at least photos are real so that a magnetic sounder can be recognized from piezo ones as magnetic are usually taller.
I was working on a handheld astronomy device a few years ago and had the same battery problem. The lightbulb moment was when we used the same batteries, but in a different order and noticed the calibration was off. Our solution was to use “battery condoms” — mu metal shields around each battery.
OMG ‘battery condom’ I’ve never heard that before, can I please use that?! lol
That’s a clever workaround; what did you end up using? Would tin foil and tape do the job?
Aluminum foil no. Must be ferrous.
As [Mike] mentioned “mu metal”, it’s a special blend ferrous metal that is really good a shielding magnetic fields than a plain blend ( https://en.wikipedia.org/wiki/Mu-metal ) but obviously more expensive for the same quantity (thicker ferrous material could also be used and would be cheaper but mu-metal is great when space or weight is limited)
“I used the standard 12 mm piezo”
A Digikey search for 12mm round, through-hole piezo buzzers returns exactly two results. (Mallory PK-11N40PQ or PT-1140PEQ). So what you’re asking for does exist, but is hardly a common “standard”.
Magnetic transducers in that sort of shape, on the other hand, are extremely common and much cheaper, from many different manufacturers such as PUI or Mallory. (As a quick guide for field inspection, note that the pizeos such as the examples mentioned are smaller – they’re not as tall as the magnetic ones. They are internally simpler and so require less internal size.)
Any credible distributor will give you exactly what you ordered, and you’ll have the datasheet for it. (If they ship you the wrong thing by mistake, or some bad stock has gotten into the supply chain, I’m certain they will want to know about it and correct it.)
Or wait, let me guess, you bought it from AliBaba with no real identity of the manufacturer or datasheet?
Well that’s fine, but the concept of “fake” components is essentially meaningless in this context.
If you were specified a well-defined part, a product with a known identity and datasheet spec, then you might have a “fake” device but this is really a completely different issue than the issue of choosing to buy mystery budget parts.
In that case all such purchases are intrinsically “fake” – they all have unknowns and risk, and require careful experimentation, testing, and R&D to validate that they do what your application requires.
Wouldn’t have fooled me. I knew they were flat and more than half an inch in diameter.
My GPS was hacked by codename “me” could u tell me who that is?