We’ve all heard linear motors, like those propelling Maglev trains, described as “unrolled” versions of regular electric motors. The analogy is apt and helps to understand how a linear motor works, but it begs the question: what if we could unroll the stator in two dimensions instead of just one?
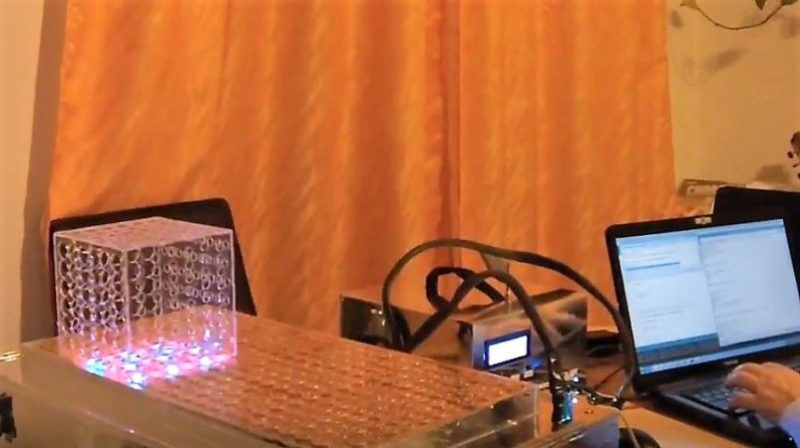
That’s the idea behind [BetaChecker’s] two-axis stepper motor, which looks like it has a lot of potential for some interesting applications. Build details are sparse, but from what we can gather from the videos and the Hackaday.io post, [BetaChecker] has created a platen of 288 hand-wound copper coils, each of which can be selectively controlled through a large number of L293 H-bridge chips and an Arduino Mega. A variety of sleds, each with neodymium magnets in the base, can be applied to the platen, and depending on how the coils are energized, the sled can move in either dimension. For vertical applications, it looks like some coils are used to hold the sled to the platen while others are used to propel it. There are RGB LEDs inside the bore of each coil, although their function beyond zazzle is unclear.
We’d love more details to gauge where this is going, but with better resolution, something like this could make a great 3D-printer bed. If one-dimensional movement is enough for you, though, check out this linear stepper motor that works on a similar principle.













i don’t really see an application here, seems like it would get insanely expensive to do this with a much higher resolution and/or area. Maybe something like microstepping is possible, eg. hold the payload in between two coils.. also someone point this guy to some video editing tips, this looks like a “my first windows movie maker project” and made me a bit nauseous tbh. fuzzy, low-brightness footage interleaved with high contrast text at huge brightness and using cheap transitions, just no man.
Hmmm…. Sea of permanent magnets and the solenoid coils on the moving body? Maybe with a ferromagnetic grid between the perm mags for holding/braking? Low power hold in any position by friction and micropositioning in two dims….
The plate of permanent magnets and coils on the mover is exactly how existing 2d steppers work.
https://www.youtube.com/watch?v=cw_F3CwUM7Q
(Facetious doesn’t carry through text… sorry)
Mix magnetic particles into asphalt then run over the finished surface with a pattern magnetizer. Put the motive unit on vehicles to move themselves.
I don’t believe the plate is magnets, but a ‘toothed bed’ of iron, in the same way as rotary steppers have toothed rotor.
jack: you are correct. The teeth are square, since they have to be toothed in both directions. The space between the teeth is filled with epoxy, though, and the plate is then surfaced so that it will work as one side of an air bearing. The same is done with the bottom surface of the forcer of course, which is what they call the moving part.
Oh – but there ARE magnets in the platen, just as there are magnets in the stator of a rotary stepper.
This concept has a big disadvantage and these are the tow cables. For example, if you want to speed up the runner on a longer distance or high speed, you had no chance. No wheelless free driving vehicles possible. No wireless energy transformation between plate and vehicle (runner). The practical freedom degrees are very limited in cases like production lines …
Where can I buy this dual Axis linear stepper motor?.
Sometimes you gotta develop an idea without an application in mind. There’s loads of research that was pointless in its day but found a crucial niche. I think our next-financial-quarter thinking is screwing us in the long run.
I bet there could be some use for this somewhere. Maybe not a whole CNC machine designed like this, but you have to think broader than that. Linear stepped articulators without rotating parts could be handy in medical tech I’m sure.
i agree, hell i would build it just for the fun of it alone, but there is nothing novel here, just a larger implementation.
Saw a YouTube video from an elevator company where they were working on an elevator that could go sideways as well as up and down in the elevator shaft, the application being for tall buildings they could need less cars than a traditional setup and/or have more flexibility. Their application uses an linear motor with ‘switches’ that rotate to move the cab sideway to the next track. (it also had safety rails in place as well to hold the car in a power failure)
I could see something like this in that application, although this has a long way to go to actually be used there…
That is absolutely right. Especially in this case, it is a demonstrator that is supposed to show something physically that could not be shown that way before.
Move and hold in 3 dimensions. (not only with micro-robots)
This example gives a lot of ideas what is “physically makeable” i a real everyday world …
I need this kind of a robot to perform two dimenssional uniform movement for a medical physics based project. How can I get help to make this kind a robot or buy it? What sofware is used for ordering the ssystem movement?
“i don’t really see an application here”
I can think of a lot……..
I am pretty sure that stratsys had a printer with the heads moved like this.
https://youtu.be/LA_ykm4LewY
You know it’s legit because it’s got blue LEDs and a techno-beat.
He may be onto something, but this video is hard to watch. Who remembers the magnetic robots of a few years ago? That’s also a linear, 2 axis stepper motor. They have the patent too.
Or basic processes… but ON THE INTERNET!
i could see it being useful in liquid handling robotss for biology/chemistry labs.
with current designs, the pipettes are moved around instead of the sample trays. this would 1) allow you to have multiple things moving around simultaneously. 2) allow people to put their hands inside the work volume of the machine without risking being stabbed by high speed pipettes. 3) replace the pulleys, belts and linear shafts with a glass-covered grid of windings. the glass surface would be far easier to keep clean in a lab environment. 4) probably some other benefits i’m not thinking of immediately.
96 well plates and such weigh nothing, even full of samples, so they ought to be easy for something like this to move around.
Yes. A very useful application.
It reminds of this:
https://www.youtube.com/watch?v=7_Wh6i8Hb6c
https://hackaday.com/2014/04/23/micro-robots-are-scary-awesome/
This is nothing new, and has in fact been around for decades…. it just doesnt have many use cases. Also, this video is extremely painful to watch. i suggest just simply clicking the back button and not bothering to watch the video. You will have a headache afterward. However, it may be that this video was produced in 1992, and in fact there is something to be seen. Like blue and white LED’s in 1992, or that laptop. Maybe hes a time traveler and that is the real motive of the video. Must have forgotten his camera and video editing software.
No, it raises the question! No question is being begged. I try not to be pedantic about things but “begs the question” is an important phrase in logic that I’d really rather not see lose its meaning.
It lost its meaning long ago. You’re just still holding onto the formal meaning. I used to believe as you do but then I read this…
https://www.merriam-webster.com/words-at-play/beg-the-question
ah, i learned something new today
‘Beg the question’ is a phrase from formal logic—it’s a 16th century translator’s rendering of Aristotle’s ‘petitio principii’. A better translation would have been “assume the conclusion.”
Heap of applications in biology lab fields.
I first saw something like this commercially available in the early 90’s, and looked at using them for an application I was working on. At the time, the net force available was not great, and the controller was a bear to talk to, but the showstopper was the required compressor for the air bearing they used. They looked like these (newer) ones: https://www.youtube.com/watch?v=cw_F3CwUM7Q
Back then, then stator platen was passive, and the moving part was energized, and there was no repulsion involved: it depended on the air bearing to keep the parts apart. I do recall wondering if it was possible to make the stator active, to levitate magnetically, and transmit enough power to the moving part to be useful. I’m glad to see progress has been made!
It’s not clear how the Z axis (height) is controlled here though. Except for a short stationary teaser, It *looks* like it might just be rubbing/sliding on the top of the coils. The added acoustic distraction (I’m not going to call it “music”) is masking the possible noise from the slider, so it’s hard to tell.
Someone needs to find the videographer and smack them.
Literally feeling dizzy after watching that as well.. Holy rotating jump cut animation, batman! :)
Old electroglas wafer handlers used for probing ICs prior to sawing use 2D steppers although I forget exactly how they worked. They were very expensive machines for what they did. The bed was at least 3x2ft and the sled at least 1ft on the side. Accuracy was the main goal as well as repeatability and speed.
Cool project, love the LEDs and the retro music! Might be good to control sliding doors in tight spaces. Just need these in strips like Neopixels
That video… hehe.
I believe wafer steppers from ASML also use something similar to this.
Accuracy is in single digit nanometer or better.
They do. Accuracy is in the micrometer range though. Fine alignment (sub-nanometer afaik) is not actually done by the main stage. And the new EUV systems even do this in a full vacuum. (Wish I could talk about it more, it’s truly awesome stuff. (And they’re scanners nowadays btw, not steppers, that’s old tech :)
It goes further with the 2nd video. Individual magnetically controllable bricks that act as particles of a larger controllable structure. Sadly, it’s concept only.
https://www.youtube.com/watch?v=TTNPdDhcTqo
Wait, didn’t I see this in Big Hero 6?
No, you see this the first time in Terminator2. T1000.
But …
forget your paranoia for a moment
If you think seriously about this idea, you’ll quickly realize the potential behind it.
Just as the microprocessor became the basic element of a universal tool in the 1960s, this idea makes it possible to create a universal robotics element.
In other words: One R & D -> many future applications.around the globe
Hardware will created like molekul-structures.
The basic physical concept are the 10 Videos you can see in the project description.
https://hackaday.io/project/29190-area-stepper-motor-with-wireless-energy-supply
And
Everything about this future technology comes down to a single dominant parameter:
Energy density / volume & mass per robotics element
If a critical energy density per robotics element is exceeded, you can build each robot cell, such as body cells of living things to a complex structure. (morphing hardware)
But with the difference that these robotic “body cells” transport their energy wirelessly via light and or microwaves from cell to cell and that their spatial representation can be transformed by software.(take a closer look at the basic video above)
An example:
Imagine you are in space near a central star. The only thing there is in abundance …. Yes, right
“light, radiation”. (nothing else)
So if every single robotic-cells works with light, radiation, this cell can “live” as long as LIght exsists!
And now imagine, you have a breakdown. A simple small crack in a linkage of your spaceship, or a leak, or you need to reinforce a shield before a solar storm, or you need a dynamic space suit that keeps you alive in a vacuum and dynamically adapts to your every move, like clothing you have an injury.
Imagine the other way: you have to take a reserve, a storage for each of these many millions of cases each time in space???
A spare parts spare wheel store,
a clothing store,
a medical emergency storage facility,
a radiation protection storage facility,
a storage facility for the production of various gases,
a storage facility for energy.
and so on
In other words
This morphic robotic is one of the tickets to life on other planets.
IF … IIf we jump over a central hurdle:
the critical energy density / volume & mass
think about.
greetings
Peter
;-)
Put these in solar roadways, make them actually work, then get back to me
Make a bigger surface with smaller coils, little cars floating on top with the cool lights underneath would make for a cool ‘slot’ car track.
Or bring some computer games into the physical world.
Hell, a table with the coils embedded in it – no need to pass the salt. It just makes it way to you.
Never heard of 2d steppers before. very cool even if its been around for a while. Seems like an obvious way to allow unlimited movement for a VR player to walk around by having little platforms move around under your feet. With fast enough tracking of the feet I’m sure it would allow someone to walk/run without even moving.
SRI has a micro version of this
https://youtu.be/uL6e3co4Qqc
Some time in the 1994-1996 time frame a group at CMU did the microfactory which if I recall was a partnership with Seagate. The whole premise was platens like this but fabricated in such a way to get sub micron resolution. They used PSD sensors as beacons so they could provide local position verification with bizarre accuracy. The entire project was incredibly innovative as they had to solve a number of problems. (Beacons were modified LED’s, vacuum based counterbalances, etc.) I have no affiliation with the project or the university and blundered into the work at one point.
Adept robotics (or someone like that) also had a platen robot that utilized inverted XY platens.
Once you put more than one puck on the platen, it simply struck me that traffic management became huge. Conveyors and indexers are synchronous but the platen system was certainly asynchronous!
You get the same problem when you twist your brain around mobile robot assemblers. If you make the robot go to the work zone a ton of communications and planning has to be handled somewhere. A conveyor or dial doesn’t require a conductor and can be readily reconfigured by moderately technical factory personnel. I have to imagine re-configuring one of these platen micro-factories would have been a hand-full.
Put these in solar roadways, make them actually work, then get back to me
If you attached the magnet to an arm and frame, or a single magnet on a ball and the socket lined with coils, you would have an omni directional joint, or even use for 2d motion for nano bots, or hexa pods. placed in a cylinder, inertia drive for water or space. Definitely better than servos and screw gears.