It’s fair to say that software-defined radio represents the most significant advance in affordable radio equipment that we have seen over the last decade or so. Moving signal processing from purpose-built analogue hardware into the realm of software has opened up so many exciting possibilities in terms of what can be done both with more traditional modes of radio communication and with newer ones made possible only by the new technology.
It’s also fair to say that radio enthusiasts seeking a high-performance SDR would also have to be prepared with a hefty bank balance, as some of the components required to deliver software defined radios have been rather expensive. Thus the budget end of the market has been the preserve of radios using the limited baseband bandwidth of an existing analogue interface such as a computer sound card, or of happy accidents in driver hacking such as the discovery that the cheap and now-ubiquitous RTL2832 chipset digital TV receivers could function as an SDR receiver. Transmitting has been, and still is, more expensive.

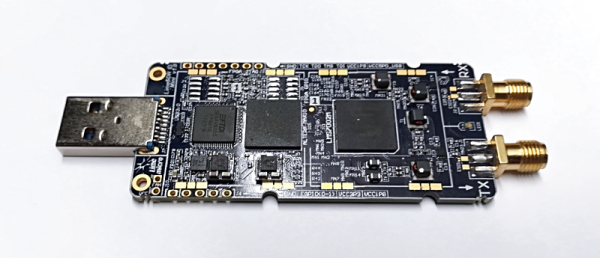
A new generation of budget SDRs, as typified by today’s subject the LimeSDR Mini, have brought down the price of transmitting. This is the latest addition to the LimeSDR range of products, an SDR transceiver and FPGA development board in a USB stick format that uses the same Lime Microsystems LMS7002M at its heart as the existing LimeSDR USB, but with a lower specification. Chief among the changes are that there is only one receive and one transmit channel to the USB’s two each, the bandwidth of 30.72 MHz is halved, and the lower-end frequency range jumps from 100 kHz to 10 MHz. The most interesting lower figure associated with the Mini though is its price, with the early birds snapping it up for $99 — half that of its predecessor. (It’s now available on Kickstarter for $139.)
Continue reading “Review: LimeSDR Mini Software Defined Radio Transceiver”










