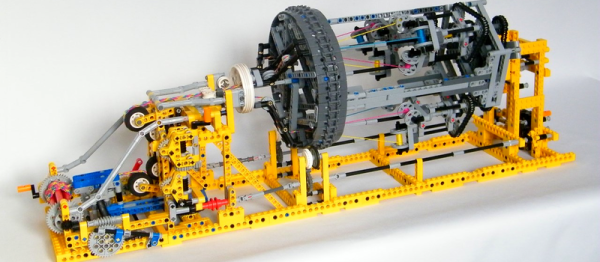
If you’ve ever seen a rope-braiding machine in action, you know they’re amazing machines where bobbins of thread whirl and spin in a complex dance to weave the threads under and over each other. Building one of these machines must be incredibly difficult; building one out of LEGO Technics pieces is darn near insane.
[Nico71], as hardcore a Technics builder as they come, tackled this complex build and made it work. A large drum spins horizontally and carries three groups of three planetary-mounted thread bobbins. The entire drum spins in one direction while the bobbins and another die with three holes spin the other way. The resulting braids are then fed through another spinning die, and the resulting 9-strand rope is taken up by a winding drum. The drum has a self-reversing feeding mechanism to keep the finished spool neat and tidy. The most impressive thing about the build, though, is the fact that it’s all powered by a single motor, and that everything is synchronized via gears, shafts, sprockets, chains and clutches. It’s a Technics tour de force you can see in action after the break.
[Nico71]’s build are pretty amazing. Some are pure art, others are models of classic cars and motorcycles, but things like his loom and the calculator he’s working on now are remarkable. Of course if you need to see more of the mesmerizing ballet of rope-braiding machines, check out this 16-bobbin hand-cranked version.
Continue reading “Rope Braiding Machine Built Entirely From LEGO Technics”






 The current iteration is complete and builds upon
The current iteration is complete and builds upon 








