Back in 1988 [Ben Reardon] walked through the Japanese pavilion at the World Expo held in Brisbane, Australia. He saw a robot playing a classical guitar, and was in awe. Later in his life, he decided to learn guitar, and always thought back to that robot. After going to SIGGRAPH 2014 and being inspired by all the creative makers out there, he realized the technology was here — to build his own Robot Guitar.
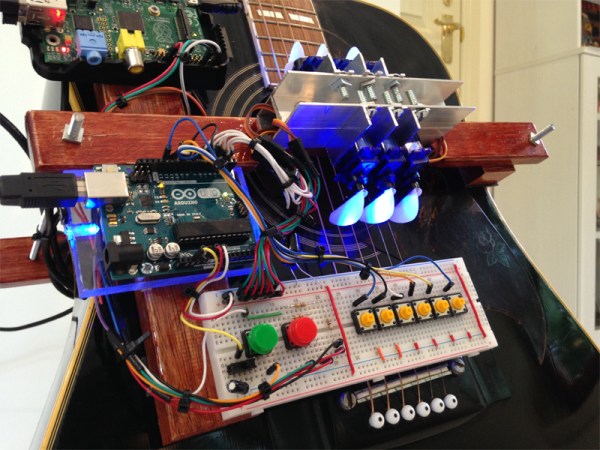
He started small though — with a prototype robotic Tambourine. It helped flush out some of the ideas for coding that he would eventually employ on the Robot Guitar. The guitar features both an Arduino and a Raspberry Pi, along with six RC servos — one for each string. The biggest challenge with the project was getting the servos mounted just right — stiff, but with adjustment so each pick could be tuned for identical timing. He ended up using aluminum extrusion to mount the servos, three per side in order to leave space for the picks.
Once the mechanical portion was done — onto the coding…
In the end, it ended up being only 460 lines of code. Python and a bit of Bash for the Raspberry Pi — and of course a few sketches for the Arduino. But enough talking about it — let’s hear it!
Continue reading “Robotic Player Guitar Rocks Out On Its Own”