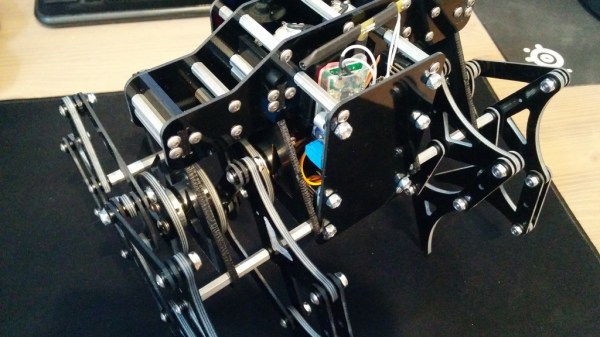
Theo Jansen’s Strandbeest design is a favorite and for good reason; the gliding gait is mesmerizing and this RC version by [tosjduenfs] is wonderful to behold. Back in 2015 the project first appeared on Thingiverse, and was quietly updated last year with a zip file containing the full assembly details.
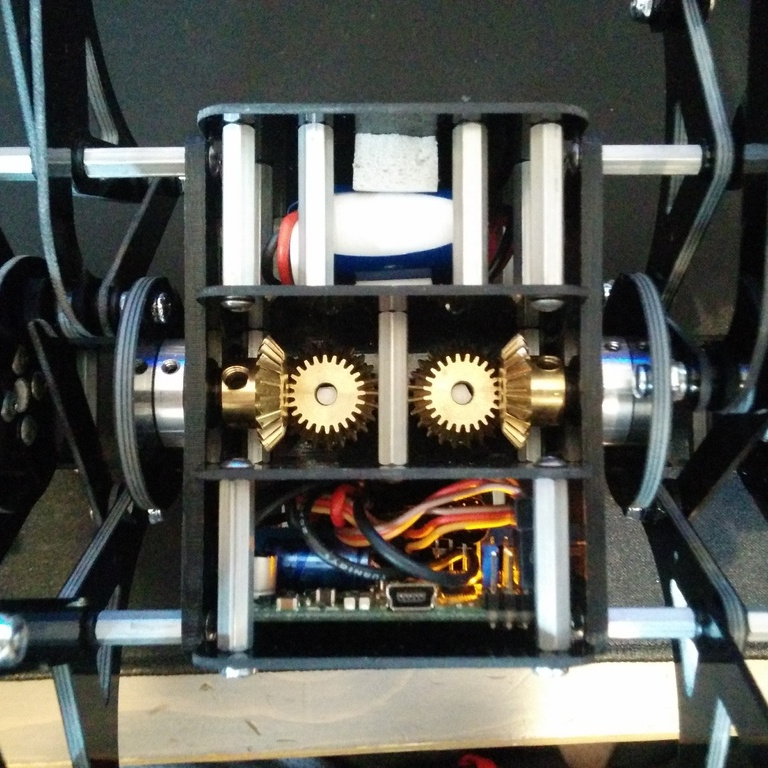
All Strandbeest projects — especially steerable ones — are notable because building one is never a matter of simply scaling parts up or down. For one thing, the classic Strandbeest design doesn’t provide any means of steering. Also, while motorizing the system is simple in concept it’s less so in practice; there’s no obvious or convenient spot to actually mount a motor in a Strandbeest. In this project bevel gears are used to mount the motors vertically in a central area, and the left and right sides are driven independently like a tank. A motor driver that accepts RC signals allows the use of an off the shelf RC transmitter and receiver to control the unit. There is a wonderful video of the machine zipping around smoothly, embedded below.
Legendary sudomod forum user [banjokazooie] has once again demonstrated their prowess in Wii U console modification — this time by transforming it into a powerhouse portable computer!
We loved [banjokazooie]’s RetroPie Wii U mod, and happy to see them back again with this build. What’s in this thing this time around? Buckle up ’cause it’s a ride: an Intel M5 processor core M on their Compute Stick, 4GBs RAM, a 64GB solid-state drive, a 2K LCD touchscreen, Bluetooth, WiFi, a 128GB SD card slot, two 3.7V 4000 mAh batteries, a Pololu 5V,6A step-down voltage regulator, a Teensy 2.0++ dev board, a battery protection PCB, a USB DAC sound card, stereo amp, a USB hub for everything to plug into, and a TP5100 battery charging board. Check it out!
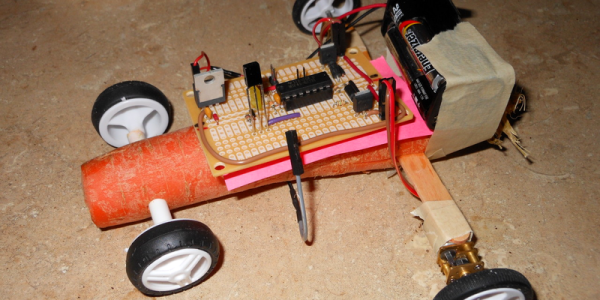
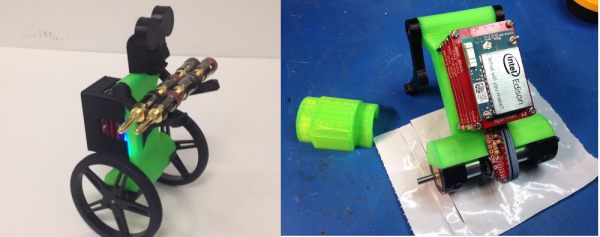
Sometimes people joke about not wanting to get in mind of a crazy person. We understand. While we could certainly follow [Michael Kohn]’s logic, the motivation was alien. Either way, in a rare turn of events there was not a single Arduino to be seen; just reverse engineering, unique solutions, and even a custom board. This is what some of you have been asking for… we think.
The brain of the questionable contraption is a TI MSP430G2231 and a tiny forward only motor driver circuit. The MSP waits for a signal from a hacked IR remote control from a cheap RC car. It then turns those into the appropriate motor control signals which go to some of those nice tiny metal gearboxes.
There were, naturally, a lot of technical issues in mounting the electronics to the food that, well… they didn’t need to be solved, but they were solved. For example, masking tape apparently does not stick well to green peppers, so toothpicks must be employed to pin the tape in place. Hopefully knowledge like this is scheduled for the nightly wipe while we sleep, but we’ll probably hold onto it till we die, unlike expensive piano lessons.
In the end we had a good laugh, and the idea is so dumb it will probably be an educational Kickstarter next week. Video after the break.
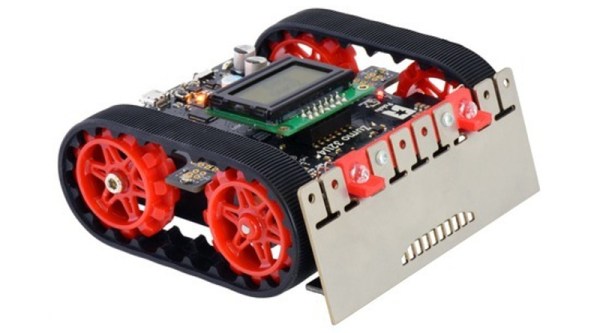
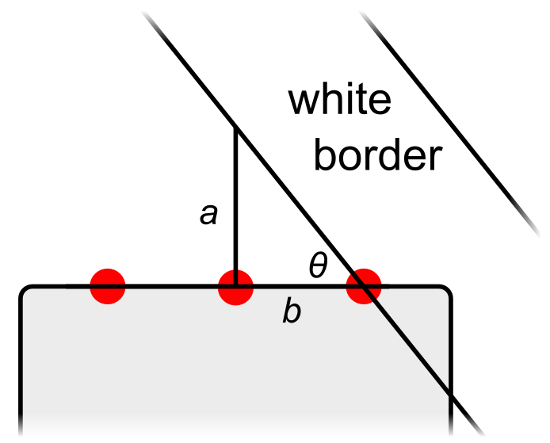
The basic rules of sumo robotics is exactly like human sumo – push your competitor out of the ring. [David]’s robot is special because it not only detects the competition border but measures the robot’s angle to the perimeter circle. Knowing the angle, [David]’s robot can turn and run for the center of the arena, the safest location. Once safe it can attack competitors from a symbolic high-ground. Unfortunately, the robot was a light weight in an already low weight class competition. It failed to push any competitors out of the ring and did not fare well in face-to-face battles.
[David]’s bot uses a three LED line sensor, pretty common today for line following, to detect the boundary. As the ‘bot is moving an outer sensor will detect the border. It continues to drive forward until the middle sensor gets a hit. That provides the measurements need to calculate the angle. Neat and simple! Knowing the angle, the robot scoots to the center to plan its next attack.
[David’s] made the code for his bot’s brain, an Arduino compatible ATmega32U4, available so it will be interesting to see if the competition picks up on this trick.
Zumo Red meets Sumo Necko and a few more competitors in the video after the break.
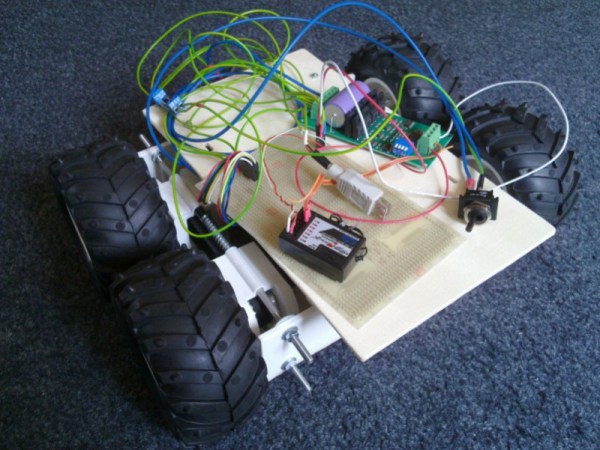
[Andrey Nechypurenko] has posted the second part of his robotics ground vehicle design guide. In his first post [Andrey] detailed the mechanical design decisions he faced. [Andrey] now begins covering the electrical components, starting with manual control using a standard radio control system. To accomplish this an RC system was used with an MD22 h-bridge driver and a picoUPS.
The MD22 is a neat motor control board which can take the PWM signals from the radio controller and use this to drive the DC motors. Optionally it can also use an I2C interface, giving a nice migration path to integrate with a microcontroller. Until that happens this can’t really be called a robot — its more of an RC vehicle. But the iterative design and build process he’s using is a good one!
The picoUPS provides on-board battery charging. Due to its UPS heritage it also allows the vehicle to be powered from an external supply, which has proved useful during development. Finally, a 5v regulator was required to supply the on-board digital logic. [Andrey] wanted a quick drop in solution with a budget large enough to allow for future expansion and went with the Pololu D15V35F5S3 which can supply 3.5 amps in a small and easy to use module.
After breadboarding the system [Andrey] fabricated a PCB to integrate all the components. The next step is to add sensors and and embedded computer to the platform.
[Renee] dropped a tip to let us know about EddiePlus, her balancing robot creation. As its name might imply, EddiePlus is controlled by an Intel Edison processor. More specifically, [Renee] is using several of Sparkfun’s Edison Blocks to create Eddie’s brain. EddiePlus’ body is 3D printed, while his movement comes from two Pololu DC motors with wheels and encoders. The full build instructions are available as a PDF from [Renee’s] Google drive.
Eddie is able to balance and drive around on two wheels, much like a Segway. Sensor data for balance comes from Sparkfun’s LSM9DS0 based Inertial Measurement Unit (IMU) block. In this new “plus” version of Eddie, [Renee] has added encoders to the robot’s wheels. This makes it easier for him to adapt to changing loads – such as pumping iron (or banana plugs as the case may be). The encoders also help with varying terrain, as [Renee] demonstrates by tilting a board as Eddie drives on it. Eddie’s code is written in C, and available on Github. Controlling Eddie is as easy as sending simple commands via UDP.
As you might imagine, the Intel Edison still has plenty of cycles left over after computing Eddie’s balance. [Renee] uses some of these with a webcam based teleoperation mode.
LVBots, a club for robot building enthusiasts in Las Vegas, held an open house the week of CES. This was the only trip [Sophi] and I took away from the conference halls of The Strip and it was a blast! The group holds meetings twice a month in a space provided by Pololu — a well-known robotics and electronics manufacturer headquartered just south of McCarran International Airport.
[Claire] demonstrating robotic closet demo and app
The mechanized racks of the automated closet
Line-following robot demonstration
Sumo robots about to rumble
Before the formal part of the gathering started there were several builds being shown off. [Claire] and [Brian] recently participated in an AT&T sponsored hackathon. Their creation is a robotic closet. The system involves moving racks of clothing which are tracked by a smartphone app. Interesting features discussed for the software include monitoring when each garment was last worn, last washed, and if it is appropriate for current weather conditions. Dig into the code in their repo.
In other parts of the room a pair of line-following robots did their thing, and a couple of sumo-bots competed to push each other out of the ring. A large group was gathered around the projector watching videos of robots of all types, brainstorming about the difficult parts, how they were overcome, and how these methods may be applied to their own build. I can attest that hanging with a group of people who are trying to cue up the most amazing robot demonstrations makes for amazing viewing!
As the organized part of the meeting began I was delighted to hear about a standing challenge from the LVbots group. The Tabletop challenge has multiple phases that serve to encourage builders to start modestly and then iterate to achieve new goals:
Phase 0: bring a robot to LVBots
Phase 1: travel back and forth without falling off
Phase 2: find an object and push it off
Phase 3: push object into a goal
[Nathan Bryant] and robot
[Joe Carson] and robot
[Nathan Bryant] was one of the two robot builders trying out the challenge on this night. He built this hexapod from balsa wood and three servo motors and was testing Phase 1. The bot includes a sensor dangling out in front of the robot to detect then the table surface is no long below. At that point it backs up a few steps, turns in place, and proceeds in the opposite direction. [Nathan] mentions that he worked out all the movements in a spreadsheet and that future firmware upgrades will dramatically increase the speed at which the bot moves. We love the audible cadence of the bot which is easily observed in the video above. At one point a leg dangles over the edge and it looks like [Nathan] pushed the bot back but I don’t remember him actually touching it so I’m calling this a trick of camera angle.
One phase further in the Tabletop Challenge is [Joe Carson]. He exhibited a wheeled robot he’s been working on that includes a gripper arm on the front. The robot looks around the table for a predefined color, in this case provided by a highlighting marker. When found the bot approaches, grips, and then proceeds to move the marker over the void where it is dropped out of existence; at least from the robot’s point of view.



![[Claire] demonstrating robotic closet demo and app](https://i0.wp.com/hackaday.com/wp-content/uploads/2015/01/dsc_0378.jpg?w=540&h=360&ssl=1 "DSC_0378")



![[Nathan Bryant] and robot](https://i0.wp.com/hackaday.com/wp-content/uploads/2015/01/dsc_03961.jpg?w=530&h=353&ssl=1 "DSC_0396")

![[Joe Carson] and robot](https://i0.wp.com/hackaday.com/wp-content/uploads/2015/01/dsc_0390.jpg?w=262&h=174&ssl=1 "DSC_0390")










