[Boston Dynamics] has been just full of videos over the last few days. They’ve dropped updates on Atlas and LS3 in addition to the WildCat update we already featured.
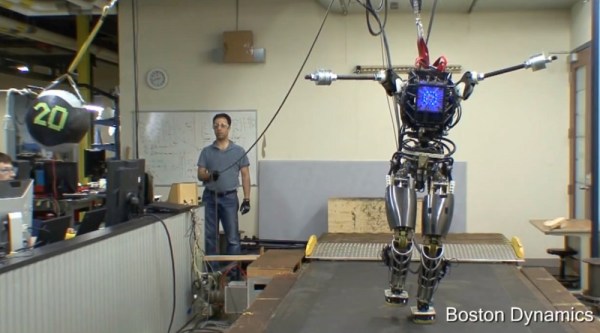
This video shows updates to the Atlas robot. This is to be a simplified version of the atlas, as compared to the robots sent off to competitors in the DARPA robotics challenge. Arms have been replaced with weights. It appears that this update focuses on Atlas’ balancing and handling on rough terrain. Atlas walks gingerly, over some crushed cinder blocks – possibly the same ones we saw BigDog throwing around recently. There are a few tense moments, but Atlas manages to get through unscathed.
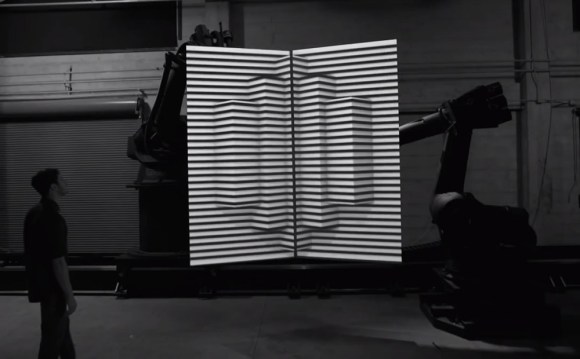
The real scary part (for us) is watching Atlas get hit with a weighted ball. We’re assuming the 20 on the ball indicates pounds. Imagine getting hit from the side with a 20lb swinging weight. Would you be able to stand up? Did we mention Atlas did this all while standing on one foot? Atlas takes it in stride though – waving its arms to maintain balance in a very human manner. Notable is the balance system. Atlas never lifts its foot off the ground. This is slightly different from the bouncing/hopping system of balance we’ve come to know and love in [Boston Dynamics’] other robots. Continue reading “Atlas Survives The Wrecking Ball”