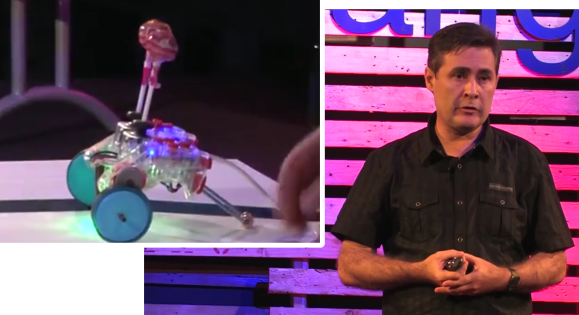
It seems that Bitcoin is all over the news nowadays, but the Bitcoin Bot is probably the first robot that will dance for Bitcoins.
[Ryan] at HeatSync Labs in Mesa, AZ, is a fan of the cryptocurrency, and decided to build something to accept it. He discovered that Coinbase, a popular hosted Bitcoin wallet service, has a callback API. This causes Coinbase to fetch a specified URL any time a wallet receives a transaction, and provides information on the transaction in the request. A Python script handles these requests and updates a running count of the BTC balance sent to the robot’s wallet.
On the hardware side, an Arduino with an Ethernet Shield checks the balance. If it has changed, it calls the dance function and the luau girl dances.
The robot sits in the window of the hackerspace, so anyone passing by can read about Bitcoin and make a donation. The source code is on Github, and a video follows after the break.