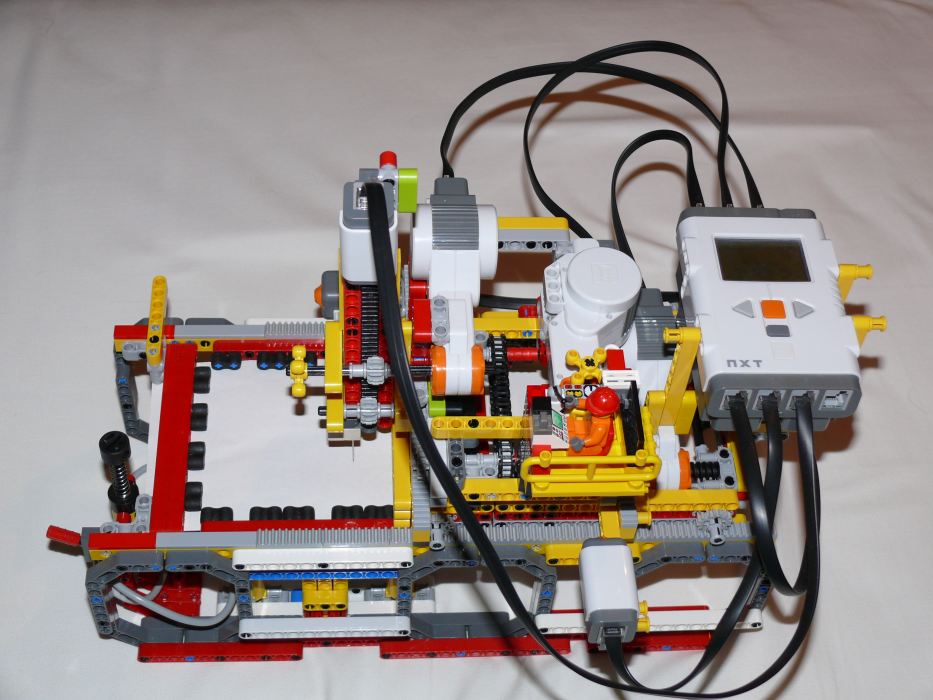
Check out this awesome tool that [Alfonso Martone] built and wrote in to tell us about: a pin plotter made entirely from Lego (except for the addition of a pin in one brick). [Alfonso] has managed to get 33dpi resolution with a “printable” area of 90x70mm. The NXT device reads 1bit bitmapped images in PBM format and outputs onto a sheet of paper, which is held in place by Lego pneumatics pushing against rubber Lego bricks. Output is not what you might call speedy, though: it takes 35-40 minutes to output a drawing with 1,500 holes.
Robots Hacks2448 Articles
Robot That Runs On Rat Brain Cells
Scientists at the University of Reading have created a robot that runs not on microprocessors, but on brain cells extracted from a rat fetus. The robot is equipped with several sensors which stimulate the rat neurons whenever the robot approaches a wall; the response of the neurons then determines whether the robot avoids the wall or crashes into it. The truly fascinating bit is that the rat brain cells don’t automatically know how to respond to the stimuli from the sensors, but instead learn to respond appropriately through repeated stimuli.
No word yet on whether the scientists will teach the robot to sing “Despite all my rage / I am still just a brain in a vat”.
Creepy Robot Eye Follows You And Winks In Response
Opto-Isolator is an interesting art installation that was on display at the Bitforms Gallery in NYC. This single movement-tracking eye creates a statement about how we view art and is a response to the question “what if art could view us?”. The somewhat creepy display not only follows the person viewing it, but mimics blinks a second later and averts its gaze if eye contact is kept up for too long. Its creators [Golan Levin] and [Greg Baltus] have done a great job mimicking human behavior with such a simple element and the social implications of it are truly fascinating.
If they wanted to, [Levin] and [Baltus] could possibly crank up the spook factor by adding facial recognition and programming it to remember how certain people interact with it, then tailor its behavior to wink at different rates or become more shy or bold, depending on the personality of the person watching it. Of course, that would require that someone goes back to it more than once…
[via Glass Tumbler]
Autonomous Helicopter Learns Autorotation
Stanford’s autonomous helicopter group has made some impressive advancements in the field of autonomous helicopter control, including inverted hovering and performing aerobatic stunts. The group uses reinforcement learning to teach its control system various maneuvers and has been very successful in doing so. One of their latest achievements was teaching the bot the emergency landing technique autorotation. Autorotation is used when a helicopter’s engine fails or is disengaged and works by changing the collective pitch to use the airflow from descent to rotate the blades. The group has more flight demonstrations on their YouTube channel.
[via BotJunkie]
Drive A Robot In Australia Over The Web
BP Australia has commissioned an online game where you get to drive robots around an obstacle course. Make no mistake, these are real robots. Actually they are modified versions of the Surveyor SRV-1 vehicles that are popular with research labs, and schools everywhere.
Go to the website, get in queue and pray for no clouds. These babies are solar powered, so you’ll have to try to get in while its day time in Australia. The entire set is built in miniature, so you feel like you’re driving a tank around a city.
[via Robots Dreams]
Hacking Pleo For Face Recognition And Remote Control

GRIP, the Group for Interdisciplinary Psychology at the University of Bamberg have put together a couple tutorials on hacking the Pleo. For those unfamiliar, the Pleo is a small robot shaped like a dinosaur. Their goal was to make it cute and simulate emotion at a higher level than previously attained by consumer robots. Ugobe, the makers of Pleo encourage hacking of the unit and the controlling software. Look at the “developers” area of their site to download all kinds of tools to work on your Pleo.
The two tutorials released by GRIP cover adding wireless communication with a PC and adding a higher resolution camera to the unit. The goal was to make the platform capable of doing facial recognition.
Continue reading “Hacking Pleo For Face Recognition And Remote Control”
Remote Controlled Pill-bot

The NanoRobotics Lab at Carnegie Mellon University has come up with a medical robot that can be swallowed, and is then able to be controlled from outside the body. The device has small arms with adhesives that can attach to slippery internal surfaces, which has previously proven difficult. Once inside the body, it can be used to view damaged areas, deliver drugs, as well as biopsy questionable tissues, and possibly even be used to cauterize bleeding wounds with a small laser. The device could be stopped, and even reversed to get a better look at areas that may have gone unnoticed otherwise. This would be a major advancement in diagnosing intestinal problems, and could lead to potentially life saving treatments. Did we mention that it has lasers?
[via Neatorama]









