[adam] is a caver, meaning that he likes to explore caves and map their inner structure. This is still commonly done using traditional tools, such as notebooks (the paper ones), tape measure, compasses, and inclinometers. [adam] wanted to upgrade his equipment, but found that industrial LiDAR 3D scanners are quite expensive. His Hackaday Prize entry, the Open LIDAR, is an affordable alternative to the expensive industrial 3D scanning solutions out there.
![The 3D scan of a small cave near Louisville (source: [caver.adam's] Sketchfab repository)](https://hackaday.com/wp-content/uploads/2016/06/bildschirmfoto-2016-06-27-um-20-02-11.png)
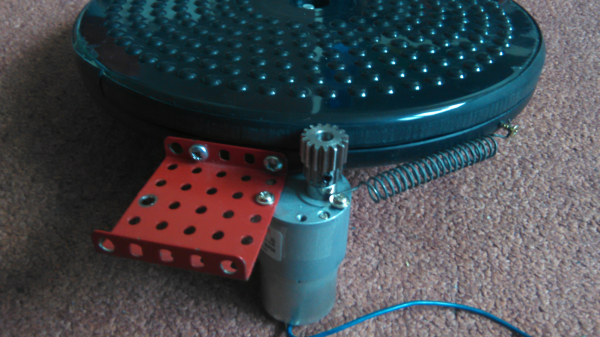
The gimbal he designed for this task uses stepper motors to aim an SF30-B laser rangefinder. An Arduino controls the movement and lets the eye of the sensor scan an object or an entire environment. By sampling the distance readings returned by the sensor, a point cloud is created which then can be converted into a 3D model. [adam] plans to drive the stepper motors in microstepping mode to increase the resolution of his scanner. We’re looking forwards to see the first renderings of 3D cave maps captured with the Open LIDAR.







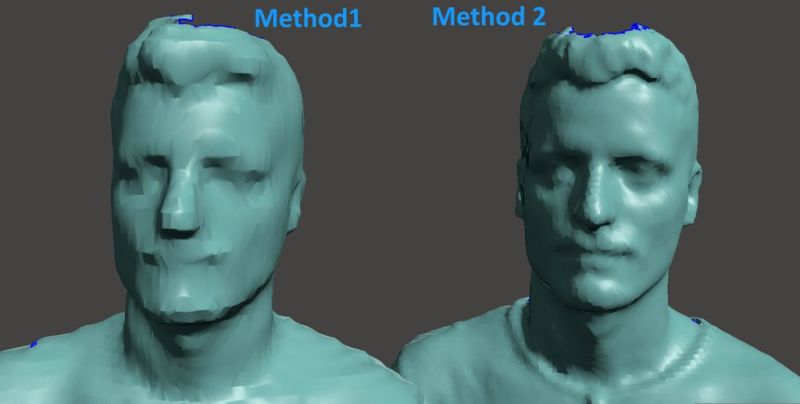 scans of large objects (including people) come out looking noticeably faceted. [Luis] came up with a work-around that results in a much finer detailed scan. Instead of scanning an entire person with one scan, he would do 4 separate scans. Since each individual scan can support 5,000 faces, the resulting merged model can be up to 20,000 faces. Check out the comparison, the difference between the two scanning methods is quite noticeable.
scans of large objects (including people) come out looking noticeably faceted. [Luis] came up with a work-around that results in a much finer detailed scan. Instead of scanning an entire person with one scan, he would do 4 separate scans. Since each individual scan can support 5,000 faces, the resulting merged model can be up to 20,000 faces. Check out the comparison, the difference between the two scanning methods is quite noticeable.