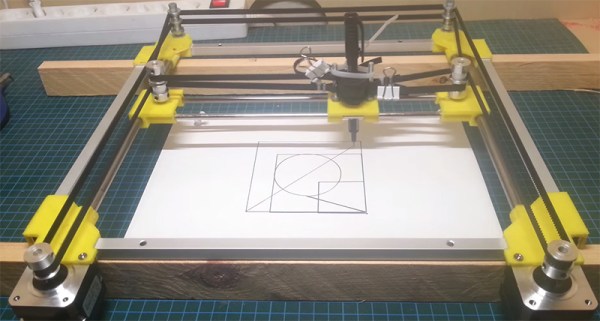
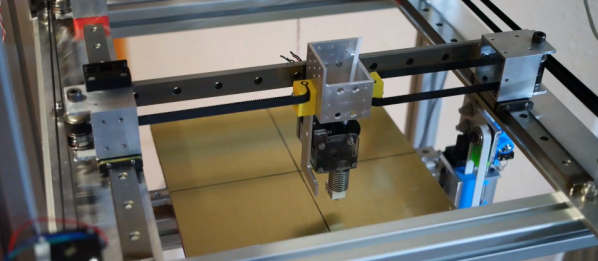
If you are building a CNC machine, a 3D printer, or even a plotter, you have a need for motion in both the X and Y directions. There are many ways to accomplish this, for example, some printers move the tool in the X direction and the bed in the Y direction while others move the entire X carriage in the Y direction and yet more use a delta mechanism. However, one of the oldest means of doing this is the Core XY method. It is interesting because both motors remain stationary and the business end moves entirely on belts or cords. This is similar to the H-Bot technique, but with some differences. [Michael Laws] has a video (see below) that explains how two stationary motors can move a tool anywhere in an XY region.
The idea behind Core XY goes back to at least old drafting tables. You can think of it as an object held by two ends of the same belt. As one end of the belt gets shorter the other end gets longer. The belts are arranged so that motion of one motor causes the tool to move at a 45 degree angle. That means you have to move both motors to go in a straight line.
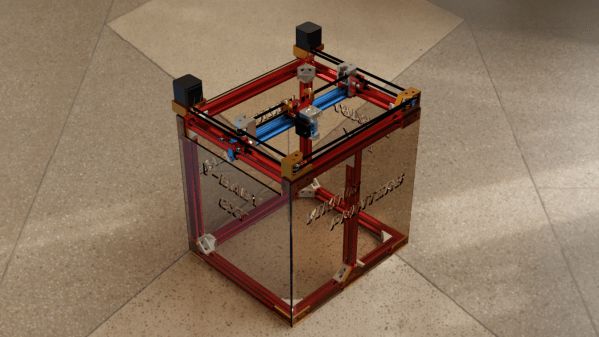



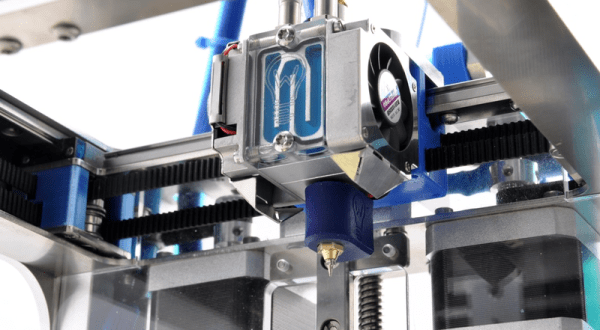
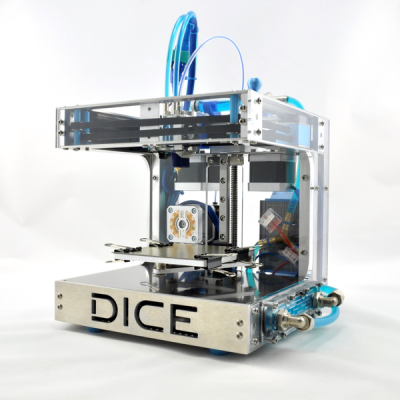 [René] had built a few 3D printers before, so he had a good feel for the parameters and design tradeoffs before he embarked on the DICE project. Making a small print volume, for instance, means that the frame can be smaller and thus exponentially more rigid. This means that it’s capable of very fast movements — 833 mm/s is no joke! It also looks to make very precise little prints. What could make it even more awesome? Water-cooled stepper motors, magnetic interchangeable printheads, and in-built lighting.
[René] had built a few 3D printers before, so he had a good feel for the parameters and design tradeoffs before he embarked on the DICE project. Making a small print volume, for instance, means that the frame can be smaller and thus exponentially more rigid. This means that it’s capable of very fast movements — 833 mm/s is no joke! It also looks to make very precise little prints. What could make it even more awesome? Water-cooled stepper motors, magnetic interchangeable printheads, and in-built lighting.